Journal Information
Article Information
과제 기반의 로봇 상지재활치료가 뇌졸중 환자의 상지 운동기능과 일상생활수행능력에 미치는 효과: 체계적 고찰 및 메타 분석
Author Information
Objective:
This study is aimed at finding the effects of task-oriented robot-assisted therapy for stroke patients in terms of the motor function of the upper extremities and ADL performance based on a systematic review and meta-analysis.
Methods:
RCTs were identified through a database search of MBASE, Ovid-Medline, PubMed, CINAHL, and Cochran CENTRAL from 1980 to December 2015, and through additional manual searches. Meta-analyses were separately conducted in terms of the motor function of the subjects’ upper extremities and ADL performance. A quality assessment was conducted using SIGN, the level of evidence was reviewed based on GRADE, and the risk of bias was assessed using the Cochrane collaboration tool. The statistical heterogeneities were also investigated, and RevMan 5.3 was used for a Meta analysis covering the averages and standard deviations.
Results:
Twelve studies were selected and reviewed. The overall task-oriented robot-assisted therapy group was made up of 341 participants (235 male, 106 female) with an average age of 60.50±5.51. The control subjects totaled 301 (207 male, 94 female, with an average age of 58.55±17.1). The improvement in the entire motor function of their upper extremities showed a statistical significance (mean difference, 0.34; 95.0% CI, -0.30 to 4.38; p<.05; I2=65.0%) with an FMA of 2.98 (mean difference, 2.10; 95.0% CI, 0.72 to 3.48; p<.05; I2=52.0%), BB of 2.25 (mean difference, 2.34; 95.0% CI, 0,30 to 4.38; p<.05; I2=28.0%), and FIM of 3.04 (mean difference, 4.14; 95.0% CI, -1.47 to 6.80; p<.05; I2=73.0%). However, their WMFT, overall ADL performance, ABILHAN, and MAL did not reach a level of statistical significance.
Conclusion:
Task-oriented robot-assisted therapy was shown to have a positive possibility for the recovery of stroke survivors, particularly in the motor function of their upper extremities and ADL performance. Further research will be needed to ground the evidence and support the clinical use of task-oriented robot-assisted therapy.
목적 :
로봇을 이용한 과제 기반의 로봇 상지재활 치료가 뇌졸중 환자의 상지 운동기능과 일상생활수행 (Activities of Daily Living; ADL)능력에 어떤 효과가 있는지 체계적 고찰과 메타분석을 실시하여 검 증하고자 하였다.
연구방법 :
1980년부터 2015년 12월까지 발표된 국외 무작위 대조군 실험(Randomized Controlled Trial; RCT)연 구들 중에서 과제와 함께 이루어지는 상지 로봇 재활치료를 대상으로 분석을 실시했다. EMBASE, Ovid-Medline, PubMed, CINAHL, Cochran CENTRAL을 통해 문헌검색과 선별을 실시했고, Scottish Intercollegiate Guidelines Network (SIGN)으로 문헌의 질평가를 The Grading of Recommendations, Assessment, Development and Evaluation (GRADE)로 근거의 수준을 마련했다. Cochrane collaboration’s tool for assessing risk of bias로 편향을 측정하고 RevMan 5.3 소프트웨어로 메타분석을 실시했다. 개별 연구들의 대상자 수, 중재 전-후 평균값, 표준편차 등을 자료합성에 사용하였다.
결과 :
12편의 연구가 최종 선정되었고 실험군의 대상자수는 총 341명(남성 235명, 여성 106명), 연령은 60.50 ± 5.51세의 분포를 보였다. 대조군의 경우 대상자수가 모두 301명(남성 207명, 여성 94명)이었고 58.55 ± 17.1세의 연령대를 보였다. 운동기능 전체의 효과크기는 2.63, Fugl-Meyer Motor Assessment (FMA)가 2.98, Box and Block Test가 2.25로 기능증진에 효과가 있었고, ADL 수행능력에서는 기능적 독립성 측정 (Functional Independence Measure; FIM)의 3.04을 제외하고 효과가 없었다.
결론 :
과제기반의 로봇상지재활치료는 뇌졸중 환자의 상지 운동기능과 ADL 수행능력에 전반적인 효과를 줄 수 있다. 장기적인 관점에서 로봇을 이용한 상지재활치료의 효과여부의 확인을 위해 임상 평가의 점 수나 등급으로 산출되는 결과변수에 대한 세밀한 추가 연구가 필요하다.
Ⅰ. 서 론
뇌졸중(stroke)은 1차적으로 뇌혈관의 막힘이나 파 열로 인해 뇌신경 조직에 손상을 초래하고 나아가 다양 한 신체의 기능적 장애를 일으키는 질병이다([Dijkerman, Ietswaart, & Johnston, 2004]). 2013년까지 통계청에 의한 역학추적조사에 따르면 단일질환으로는 국내 성인 사망률 2위를 기록할 정도로 치사율이 높으면서 빈발하 는 질병 중 하나이다. 뇌졸중에서 생존한 환자들은 운동 및 감각기능의 소실, 연하장애, 인지 및 지각 장애, 구음 장애 등의 다양한 병리적 문제와 직면한다([Trombly & Radomski, 2008]). 뇌졸중 환자에서 나타나는 여러 가지 종류의 장애 중, 상지기능의 손상은 특히, 팔과 손의 운동 기능을 이용한 작업에 막대한 지장을 초래한다([Duncan, Horner, & Reker, 2002]).
뇌졸중 환자의 상지 기능 회복과 일상생활수행 (Activities of Daily Living; ADL)능력을 제고하기 위해 그동안 전문가들에 의해 전기치료, 도수치료, 작업치료, 운동치료, 고유 수용기 신경근 촉진기법(Proprioceptive Neuromuscular Facilitation; PNF), 구속유도운동치료 (Constraint-Induced Movement Therapy; CIMT) 등의 중재가 개발되고 시도되어 왔다([Gracies et al., 2000;] [Weiss, Rand, & Katz, 2004]). 2000년대에 들어 오면서 발달하는 과학기술과 함께 산업화 생산 공장에서 주로 이용되던 로봇의 구동장치를 재활치료에 접목하는 로봇보조훈련(robot-assisted training)이 주목을 받게 되었다([Langhorne, Bernhardt, & Kwakkel, 2011]).
로봇보조 재활치료는 주로 상지와 하지 치료를 목적으 로 한 것으로 나뉘는데 하지는 보행치료에 초점이 맞추 어져 있는 반면 상지치료는 팔과 손의 재활에 집중되어 있는 특징을 보이고 있다(Wo et al., 2013). 로봇재활치 료는 초창기에는 치료사가 수행하던 상지 치료를 단지 로봇으로 교체한 형태에 지나지 않았으나 차츰 과제 지 향적 혹은 과제 기반(task-oriented)의 치료가 각광받 게 되면서 이와 병합한 방식으로 전이되는 양상을 보여 왔다([Langhorne et al., 2011]). 과제기반의 치료는 주 로 목표를 설정하고 그것을 달성하기 위해 이루어지는 과제중심의 중재 방법으로 단순 반복운동에 비해 체계적 이고 순서화된 동작의 구현이 가능하며 일상생활에 근접 한 훈련을 이끌어 낼 수 있는 장점을 가지는 것으로 알려 졌다([Timmermans et al., 2014]).
선행 연구들을 살펴보면, 과제기반의 로봇 재활치료는 로봇착용상태에서 스크린을 통해 전달되는 시각적 정보 에 대한 과제(task) 수행의 형태를 주로 보이며 이는 기 존의 비디오 게임과 유사한 방식으로 진행된다는 특징이 있다([Lo, Guarino, & Krebs, 2009]). 과제 기반의 상지 재활 훈련은 대부분이 뻗기, 잡기, 가져오기 또는 옮기기 등의 활동을 스크린을 통해 수행한다는 측면에서 가상현 실 치료와도 맞닿아 있는 복합적인 특성을 보이지만 최 근의 로봇 치료는 대다수가 과제수행과 기본적으로 함께 수행되기 때문에([Cronin, 2001;] [Winstein et al., 2004]) 독립적인 양상으로 볼 필요가 있다. 그리고 연구마다 차 이는 있지만 이를 통한 상지의 운동기능의 회복이나 ADL 수행능력의 증진 여부를 파악하는 결과 변수상의 공통분모를 내재하고 있다([Babaiasl, Mahdioun, Jaryani, & Yazdani , 2015]).
그동안 로봇을 이용한 새로운 중재방법에 대한 다수의 연구가 발표되어 왔지만 최근 들어 더욱 활발히 사용되는 과제 지향적인 방법과 결합한 로봇 상지재활치료에 주안 점을 두고 진행한 연구는 찾아보기 어려웠다([Norouzi- Gheidari, Archambault, & Fung, 2012]). 기존 메타분 석연구에서는 단지 모든 로봇 상지재활치료를 치료사에 의해 수행된 치료와 비교하는데 그쳐 과제가 수반된 로 봇치료와 반복적인 운동만을 한 치료를 구분하여 제시하 지 못하였다([Norouzi-Gheidari et al., 2012]). 그러나 로봇상지재활치료를 과제와 함께 수행하는 방식이 보편 화됨에 따라 유사 연구들을 통합하여 치료적 효과에 대 한 정량적인 검증이 이루어져야 하고, 메타분석은 이를 위한 중요하고 효과적인 방법이다([Borenstein, Hedges, Higgins, & Rothstein, 2011]).
따라서 본 연구에서는 로봇을 이용한 과제 기반의 상 지재활치료가 뇌졸중 환자의 상지 운동기능과 ADL 수행 능력에 대한 치료효과상의 근거를 제시하기 위하여 체계 적 고찰과 메타분석을 실시하고자 한다.
Ⅱ. 연구 방법
1. 연구 설계
본 연구는 뇌졸중 환자에게 시행된 과제 기반의 로봇 상지 재활치료가 상지의 운동기능과 ADL 수행능력에 미치 는 효과를 알아본 무작위대조 임상실험연구(Randomized Controlled Trials; RCT)들을 대상으로 체계적 고찰과 메타분석의 방법을 통해 분석하였다.
2. 연구 대상 및 자료수집 방법
1980년부터 2015년 12월까지 게재된 국외 RCT 연 구만을 대상으로 하였다. 문헌검색을 위한 데이터베이스 로 EMBASE, Ovid-Medline, PubMed, CINAHL, Cochran CENTRAL (Cochrane Central Register of Controlled Trials)을 사용하였다. 검색어와 관련한 검색 전략은 미국 AHRQ (Agency for Healthcare Research and Quality)가 권장하는 연구수행 방법인 PICOTSSD (Participants, Intervention, Comparison, Outcomes, Timing-Settings, Study Design)형식에 따른 체계적 고찰 검색을 시행하고 검색된 문헌의 적절성을 평가하였 다(Table 1).
| Item | Explanation |
|---|---|
| P: Participants | Adult stroke patients |
| I: Intervention | Robot-Assisted, task-oriented rehabilitation |
| C: Comparison | Different applications of robotic use, conventional rehabilitation, usual care, etc. |
| O: Outcomes | Primary outcomes : Effects of upper limb motor function (Fugl-Meyer score, MFT, etc.) |
| Secondary outcomes : ADL performances (MBI, FIM, etc.) | |
| T: Timing | No specific follow-up criteria |
| S: Settings | Hospitals, nursing homes, rehab. centers |
| SD: Study design | RCT |
PICOTS-SD의 각 항목에서 의학주제용어(Medical Subject Heading; MeSH) 및 주요 개념어를 생성하여 검색전략을 구성 하였다. 검색은 2015년 4월에 수행하 였고, 전략에 따른 검색어는 [stroke{MeSH}, “cerebral vascular accident” {MeSH}] AND [Robotics{MeSH}, [robot* OR orthos* OR orthotic OR automat* OR “computer aided” OR “computer assisted” OR “robotic device*” OR “electro-mechanical” OR mechanical OR mechanised OR mechanized OR “robot-induced” OR “robot-assisted” OR “robotrelated”] AND [“Task-Oriented” OR “Task-Related” OR “Goal-Directed” OR “Task-Specific” OR “Video Games” OR “Therapy Games” OR “Drawing Through the Monitor” OR “Performance-Based” OR “Real- Life Activities” OR “Activit*”] AND [Therapeutic {MeSH}, train* OR aid* OR rehabilitat* OR reeducat* OR therapy OR interventio*] AND [upper extremity{MeSH}, arm{MeSH}, “upper limb” OR hand OR wrist]를 사용했다. 두 명의 연구자가 동일 기 간 동안 독립적으로 검색하였고 결과가 불일치하는 부분 은 논의를 통한 합의의 과정을 거친 후 결정하였다. 분석 대상이 된 연구들의 수집 과정은 체계적 고찰 보고 지침 (Preferred Reporting Items for Systematic Revlews and Meta-Analysis; PRISMA)에 근거하여 제시하였 다([Cochrane Collaboration, 2015])(Figure 1).
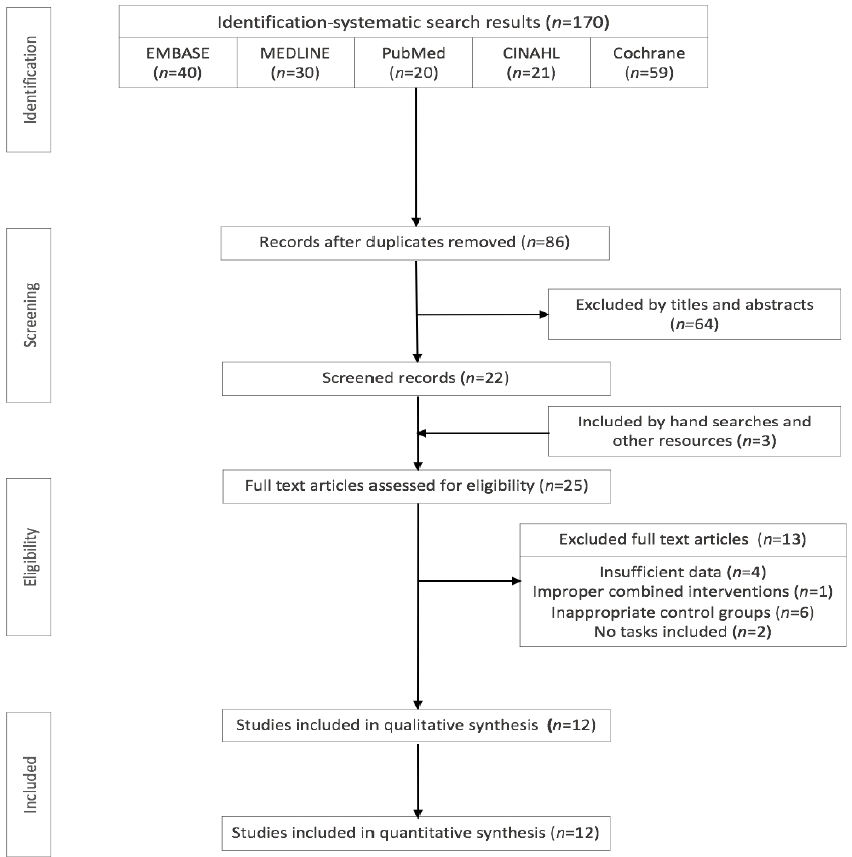 Figure 1PRISMA Flow Diagram
Figure 1PRISMA Flow Diagram
최종적으로 12편의 연구가 검색 전략과 조건에 부합 하는 것으로 선정을 완료했다.
3. 대상 논문의 선정 기준
분석을 위한 논문들은 다음과 같은 기준에 따라 선정 되었다.
첫째, 적절한 평가도구에 의한 결과가 하나 이상 보고 된 연구
둘째, 영어로만 출판된 연구
셋째, 과제기반의 로봇상지재활치료가 주 중재방법인 연구
넷째, 뇌졸중 환자의 상지 기능회복이나 ADL독립성 향상을 위한 중재도구로써 로봇이 사용된 연구
다섯째, 표준화된 평가도구가 사용된 연구
여섯째, 대조군에서 로봇이외의 다른 치료가 적용된 연구
일곱째, 메타분석을 위한 평균과 표준편차, 대상자 수 가 명확히 제시된 연구
4. 연구의 질 평가
최종 선정된 문헌들의 질 평가를 위해 SIGN (Scottish Intercollegiate Guidelines Network)을 사용하여 권고 수준을 결정하였다. SIGN은 여러 질 평가 도구 중에서도 RCT 연구에 특화된 가장 많은 부분을 포괄하고 있는 표 준화된 도구이다([SIGN, 2008]). 연구의 질적 수준에 대 한 10가지 기준(연구 질문의 적절성, 무작위 배정 방법, 눈가림법의 적절성, 이중맹검 여부, 기저수준의 동질성, 편향(bias) 여부, 결과측정 방식, 탈락률, intention- to-treat 수행 여부, 기관 간의 동질성 여부)을 만족하는 지 개별적으로 평가하는 점검목록 방식의 도구이며 6가 지 등급(WC: Well Covered, AA: Adequately, PA: Poorly Addressed, NA: Not Addressed, NR: Not Reported, NAP: Not Applicable)으로 평가과정을 객관 적으로 진행 할 수 있다. 선정된 문헌들 중 “poor” 등급을 받은 [Wu (2013)]의 연구를 제외한 나머지 연구들은 WC 와 AA를 포함하는 평가 항목이 5개 이상인 높은 질적 수준(“good”)을 보였다(Table 2).
| Study | Check item no. | Overall | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| [Prange (2015)] | AA | PA | AA | AA | PA | PA | WC | PA | PA | AA | Good |
| [Brokaw (2014)] | AA | AA | PA | AA | PA | AA | WC | PA | PA | PA | Good |
| [Sale (2014)] | AA | WC | PA | PA | PA | AA | WC | AA | AA | PA | Good |
| [Wu (2013)] | PA | PA | PA | AA | PA | PA | WC | AA | PA | AA | Poor |
| [Reinkensmeyer (2012)] | AA | AA | AA | AA | AA | AA | WC | AA | PA | AA | Good |
| [Wu (2012)] | AA | PA | WC | WC | AA | PA | WC | AA | PA | NR | Good |
| [Burgar (2011)] | PA | PA | AA | PA | PA | PA | WC | AA | AA | AA | Good |
| [Liao (2011)] | WC | AA | AA | AA | AA | AA | WC | AA | AA | AA | Good |
| [Masiero (2011)] | PA | AA | PA | PA | PA | AA | WC | AA | AA | AA | Good |
| [Lo (2010)] | AA | WC | AA | PA | PA | AA | WC | AA | AA | AA | Good |
| [Lum (2002)] | AA | AA | PA | PA | PA | AA | WC | NA | AA | AA | Good |
| [Volpe (2000)] | PA | PA | AA | AA | PA | AA | WC | AA | AA | AA | Good |
5. 근거의 수준
체계적 고찰의 근거수준은 GRADE (The Grading of Recommendations, Assessment, Development and Evaluation)를 이용하였다([Balshem et al., 2011]). GRADE방식은 연구 설계, 문헌의 질, 근거의 양, 근거의 일관성, 근거의 직접성 등의 요소로 결정된다. 연구에서 시행된 중재에 대한 근거수준을 평가할 수 있고, 후속 연구에서 효과의 추정치에 대한 확신 정도가 바뀔 가능 성을 알아볼 수 있다. 본 연구에서는 GRADE profiler 프로그램 소프트웨어로 분석해서 해당 중재의 효과에 대해 신뢰하는 정도를 파악했다. 산출된 근거요약 표에 서 과제가 수반된 로봇 상지 재활치료가 운동기능과 ADL수행능력에 미치는 근거수준은 모두 “HIGH(높 음)” 으로 판정되었다(Figure 2). 운동 기능의 경우 12 개 연구, 모든 평가도구에 대해 기록된 참여자 1050명 이었으며 ADL수행능력은 9개 연구, 1050명의 참여자 가 집계되었다. 근거의 질은 운동기능의 경우 예측되는 교란변수의 영향이 있을 수 있는 위험은 존재했으나 높 은 근거의 수준을 나타냈고, ADL 수행의 경우 큰 효과 크기를 가지면서 높은 근거수준을 보였다. 군별 위험도 (risk) 추정치에서 로봇군이 운동기능 항목에서 사건발 생의 위험도가 대조군에 비해 20.0% 낮았으며 ADL 항 목에서는 대조군에 비해 로봇 중재군이 14.0% 낮은 사 건발생의 위험도를 기록했다.
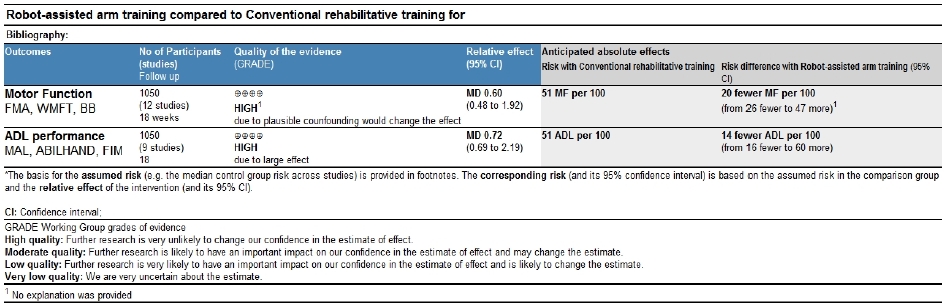 Figure 2Level of Evidence Using GRADE
Figure 2Level of Evidence Using GRADE
6. 자료 통합 및 통계적 분석 방법
체계적 고찰을 위해 12편의 연구로부터 상지의 운동 기능에 대한 평가의 종류와 측정치를 추출하였다. 각 연 구의 측정값을 통합하여 메타분석을 실시하되 개별 연구의 특성에 맞도록 자료값을 통합했다. RevMan 5.3(Review Manager Version 5.3. by Copenhagen: The Nordic Cochrane Centre. The Cochrane Collaboration, 2014) 버전에서 제공하는 데이터와 분석(data and analysis) 입력 시스템에서 데이터 코딩 작업을 진행했으며, 섹션 (section), 기술(description)에 추가 정보를 입력하였 다. 두 명의 평가자가 코딩된 파일을 독립적으로 평가한 후 명확하지 않은 부분은 논의를 통해 확정하였으며 합 의가 이루어지지 않는 부분에 대해서는 외부 임상전문가 (content experts) 1명에게 자문을 구하였다. 평가를 수 행하는 과정에서 불완전한 보고나 데이터로 인하여 의사 결정이 보류된 경우 원저자에게 직접 전화나 전자우편을 통하여 정보를 확보하였다.
[Wu (2012)]연구에서 대조군이 일반 작업치료를 받은 군과 치료사가 적극 개입한 운동을 한 두 군으로 나뉘어 져 있었기 때문에 메타분석을 위한 정량 계산 시 두 개의 실험으로 등록했다. [Wu (2013)]의 연구에서는 양손 모 두 로봇 치료를 받은 집단, 편측만 로봇 치료를 받은 집 단, 대조군으로 구성되어 있었기 때문에 정량 계산을 위 하여 각각 별개의 실험으로 독립시켜 계산하였다. [Burgar (2011)]의 경우는 높은 강도의 로봇 치료를 받은 군, 낮 은 강도의 로봇 치료를 받은 군, 대조군으로 구성된 실험 이었고 [Lo (2010)]는 일반적인 치료적 조치와 강도 높은 치료회기로 대조군만 구분하여 실험하였기 때문에 역시 독립적인 2개의 실험으로 나누어 값을 입력했다. 본 연구 에서는 메타분석을 위한 통계분석을 위해 윈도우용 RevMan 5.3을 이용했다.
1) 통계적 이질성
분석하려는 결과값의 성격이 연속변수이므로 inverse varians를 통계적 방법으로 채택했다([Borenstein et al., 2011]). 메타분석에서 결과에 대한 I2 값의 분포에 따라 판단하여 고정효과 모형(fixed effect model)이나 변량 효과 모형(random effect model)을 채택하는 것은 검 정력이 매우 낮은 태생적 한계를 내포하기 때문에 잘못 된 방법으로 알려져 있으며 최근에는 효과 모형을 채택 할 시 통계적 검증의 결과에 기초하는 것이 아니라, 연구 의 특성, 연구대상, 개입방법 등, 메타연구에 포함된 연구 들이 동일하거나 유사한 모집단 효과크기를 공유하는지 의 개념적 이해에 기초해서 연구자가 판단하여 결정하는 것이 일반화 되어 있다([Borenstein et al., 2011;] [Card, 2012]). 따라서 본 연구에서는 대상 문헌들의 연구 설계, 실험대상, 중재방법, 결과측정의 상황에 맞게 모형을 채 택하였다.
2) 효과크기
본 연구에서는 Cohen’s d 값, 즉 비교하고자 하는 두 개 집단이 가지는 평균의 차이를 통합표준편차(pooled standard deviation)로 나누어 얻은 표준화한 효과크기 (standardized mean difference)를 사용하였으며 산출 공식은 아래와 같다. 이를 위해 개별 연구들의 결과를 통 합적으로 분석하려는 목적으로 효과크기(effect size)를 위한 자료 코딩을 실시했다. 각 실험군과 대조군의 표본 크기, 평균과 표준편차를 이용하여 운동기능과 ADL 수 행능력의 효과크기를 산출하였다(95.0% CI). 효과크기 값은 0.2 이하이면 작은 효과, 0.5일 때 중간정도 효과, 0.8 이상일 때 큰 효과로 해석하였다([Cohen,1988]). 메타 분석의 정량적인 결과는 forest plot으로 검정하였다.
d = mA - mBσ
3) 편향위험도 평가
Cochrane Collaboration의 편향 위험 평가도구 (cochrane collaboration’s tool for assessing risk of bias)를 사용하였다. 두 명의 평가자가 독립적으로 평가 한 후 이견이 있거나 명확하지 않은 부분은 논의를 통해 결정하였다. 출판편의(publication bias)은 funnel plot 으로 평가하여 시각화 하였다([Keef & Roberts, 2004]).
Ⅲ. 연구 결과
1. 선정된 문헌의 일반적 특성
최종 분석대상인 12편의 연구가 메타분석에 포함되었 고 이들의 특성은 Table 3에 제시하였다. 과제가 동반된 로봇 상지재활 치료를 받은 실험군의 대상자수는 총 341 명(남성 235명, 여성 106명)이었고 연령은 60.50 ± 5.51세의 분포를 보였다. 대조군의 경우 대상자수가 모 두 301명(남성 207명, 여성 94명)이었고 58.55 ± 17.1세의 평균연령을 보였다. 실험군의 중재는 모두 과 제지향적인 활동을 기반으로 한 로봇 상지재활 치료였고, 각 로봇은 연구마다 상용화된 제품을 사용하거나 실험을 위해 독자적으로 개발한 장비를 사용했다. 과제가 동반 된 로봇 상지재활 치료를 받은 실험군의 대상자수는 총 341명(남성 235명, 여성 106명)이었고 연령은 60.50 ± 5.51세의 분포를 보였다. 대조군의 경우 대상자수가 모두 301명(남성 207명, 여성 94명)이었고 58.55 ± 17.1세의 평균연령을 보였다. 실험군의 중재는 모두 과 제지향적인 활동을 기반으로 한 로봇 상지재활 치료였고, 각 로봇은 연구마다 다른 상용화된 제품을 사용하거나 연구를 위해 독자적으로 개발한 장비를 사용했다. 중재 기간은 4주가 가장 많았고 6주, 8주, 9주도 있었으며 최 대 12주간 진행한 연구도 있었다. 각 중재는 주당 3번 혹은 5번 실시한 연구가 대부분이었고 한 회기 당 30분, 60분, 105분까지 배정된 연구도 있었다. 과제의 종류는 피아노 치기, 테니스, 퍼즐 맞추기, 경로 따라가기, 그림 지우기 등, 실제적인 환경에서 이루어질 수 있는 과제가 많았다. 기존의 일반적인 작업치료에서 수행되던 블록 쌓기, 컵 쌓기, 체커 쌓기 등의 과제들을 가상현실이나 컴퓨터 구동 방식 게임 활동들로 구현하여 사용한 연구 도 있었다. 과제들의 종류는 다양했으나 물리적 환경에 서 주로 시행되던 과제들을 전산화 형태로 전환한 방식 들을 채택한 특징이 있었다. 치료 방법적 특징으로 치료 사가 최소한의 개입을 하고 안전이나 돌발 상황을 대비 하기 위한 언어적 지시나 물리적 도움 등은 허용된 형태 를 보였다. 대조군의 치료에는 일반적인 작업치료, 치료 사가 중재하는 관절가동범위 치료, 단순한 컴퓨터 게임, 물리치료사에 의한 표준화된 치료, 레저 활동, 과제가 동 반되지 않은 상지 로봇치료 등이 적용되었다. 중재기간 은 최소 3주에서 최대 12주, 주당 3~5 세션, 회당 기본 30분에서 최대 105분 실시되었다. follow-up은 치료 종결 후 12주 이후가 대부분이었으며 24주나 27주의 기 간을 둔 연구도 있었다.
| Study | Participants | Interventions | F/Us (wks) | Outcomes of Interest | Robotict devices | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| EG | CG | Durations | EG | CG | Motor function | ADL | Others | |||||
| Age | M/F | Age | M/F | Tasks | ||||||||
| M (SD) | M (SD) | |||||||||||
| [Prange (2015)] | 60.3 (9.7) | 17/18 | 58 (11.4) | 24/ 19 | 30 min, 3 sessions/wk, 6 wks | Computerized exercises, games | Regular occupational & physical therapy | 24 | FMA, SULCS | - | Reach distance(cm) | Ameo boom |
| [Brokaw (2014)] | 57 (11.7) 9/3 | 12 hrs, 4 wks |
1) Isolated: Typing, playing the piano, molding putty 2) Whole body activities |
Standard care provided by physical therapist | - | ARAT, BB, FMA | - | Average improvements | ARMinⅢ robot, HandSOME device | |||
| [Sale (2014)] | 67.0 (12.4) | 8/3 | 72.56 (8.98) | 6/3 | 40 min, 5 days/wk, 4 wks | Task-specific robotic treatment | Standard treatment by occupational therapist | 12 | FMA, BB, MI | - |
- Muscle strength: MRC - Spasticity: MAS |
Amadeo robotic system |
| [Wu (2013)] | URT: 54.95 (9.90) | 10/8 | 54.22 (9.78) | 12/5 | 90-105 min, 5 times/wk, 4 wks | Computer games | Conventional therapies | 12 | WMFT FAS | MAL, ABILHAND | Kinematic analysis : VICON MX system | Bi-manu -track |
| BRT: 52.21 (12.20) | 13/5 | |||||||||||
| Reinkens meyer (2012) | 60 (10) | 5/8 | 61 (13) | 12/1 | 60 min, 3 times/wk, 8-9 wks | Therapy games required to manipulate virtual objects | Conventional table top therapy | 12 | FMA, BB | MAL | Grip strength(kgF) | Pneu -wrex |
| [Wu (2012)] | RBAT: 55.13 (12.72) | 10/4 | TBAT: 57.04 (8.78) | 12/2 | 90-105 min, 5 times/wk, 4 wks | Lift 2 cups, stack 2checkers, reach forward, upward to move blocks, grasp and release 2 towels, | TBAT: A variety of bilateral functional tasks RBAT: A computer game CTs | - | FMA | MAL, SIS | Motion analysis: VICON MX | Bi-manu -track |
| CT: 51.30 (6.23) | 10/4 | |||||||||||
| [Burgar (2011)] | Robot- Lo:62.5 (2.0) | 9/10 | 68.1 (3.3) | 5/13 | 60 min, 15 sessions, 3 wks | Physical objects and goal-directed set of tasks | Placebo robot therapy | 24 | FMA, WMFT | FIM | Spasticity: Ashworth | MIME |
| Robot- Hi: 58.6 (2.3) | 9/8 | |||||||||||
| [Liao (2011)] | 55.51 (11.17) | 6/4 | 54.56 (8.20) | 7/3 | 90-105 min, 5 times/wk, 4 wks | Computer games in real time | Dose-matched activities: Occupational therapy | - | FMA | MAL, ABILH AND, FIM | Accelerometer | Bi-manu -track |
| [Masiero (2011)] | 72.4 (7.1) | 9/2 | 75.5 (4.8) | 7/3 | 120min, 5 days/wk, 5wks | Specific exercise + conventional therapy | Conventional functional rehabilitation | 12 | FMA, BB, FA-T | FIM |
- Spasticity: MAS, - Muscle Strength: MRC |
NeReBot |
| [Lo (2010)] | Total entry: 66 (11) | 47/2 | ICT: 64(11) | 48/2 | 60 min, 12wks | Task oriented movements | Conventional rehabilitative therapeutic activities | 27 | FMA, WMFT | SIS | Pain scale spasticity: MAS | MIT -manus |
| UC: 63(12) | 27/1 | |||||||||||
| [Lum (2002)] | 63.2 (3.6) | 12/1 | 65.9 (2.4) | 8/6 | 60 min, 8 wks | 122 targeted reaching tasks | Functional leisure and self-care tasks | 24 | FMA | Barthel index, FIM | - | MIME |
| [Volpe (2000)] | 62 (2) | 14/16 | 67 (2) | 12/14 | 60min, 5 days/wk | Drawn a series of round target | Placebo robot | FMA, MP, MS | FIM | - | MIT -manus | |
운동기능을 측정하기 위한 평가도구로 FMA, FMSE (Fugl-Meyer Shoulder, Elbow, and Coordination subsections), FM-to t (Total Fugl-Meyer score), FMWH (Fugl-Meyer Wrist and Hand subsections), SULCS (Stroke Upper Limb Capacity Scale), BB (Box and Block Test), ARAT (Action Research Arm Test), GFT (Grasping Force Test), MP (Motor Power score), MS (Motor Status Score), NHP (Nine-Hole Pegboard Test)가 사용되었다.
ADL 평가도구로는 FIM (Functional Independence Measure), SIS (Stroke Impact Scale), Barthel Index, ABILHAND, MAL (Motor Activity Log)를 사용하여 측정결과를 분석하였다. 각 평가도구들은 각 연구에서 사용되었다고 명기한 것을 분석에 포함시켰다. 연구들은 운동기능과 ADL 수행능력을 개선하는데 과제가 동반된 로봇 상지 재활 치료가 효과가 있을 것이라고 가정하고 이루어진 실험들이었다.
2. 편향 위험도 평가
전체적으로 무작위 순서생성에 대한 부분이 불명확하 게 기술되거나 난수표를 이용하지 않은 방법을 사용한 연구가 존재했고, 배정순서의 은폐, 대상자 눈가림, 평가 자 눈가림, 보고 눈가림에 대한 위험도가 높게 나타난 연 구도 있었지만 나머지 항목들에 대해서는 낮은 편향 위 험수준을 보였다(Figure 3, 4).
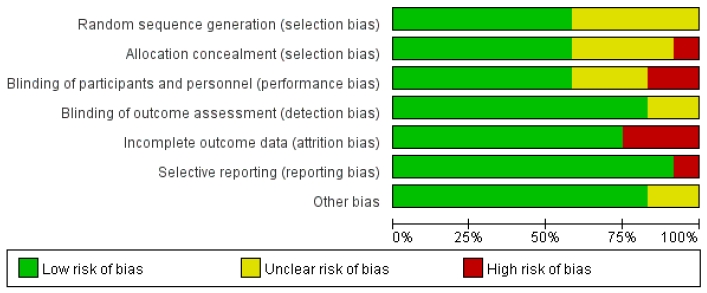 Figure 3Summary of Risk of Bias in Overall Trials
Figure 3Summary of Risk of Bias in Overall Trials
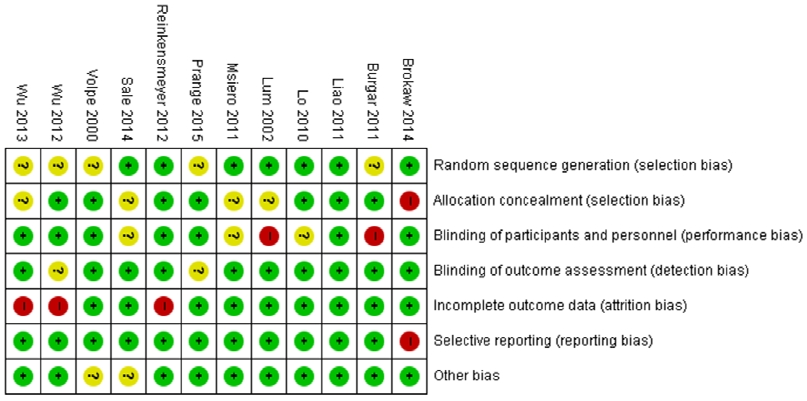 Figure 4Risk of Bias Summary: Review Authors’Judgements About Each Risk of Bias Item for Each Included Study
Figure 4Risk of Bias Summary: Review Authors’Judgements About Each Risk of Bias Item for Each Included Study
3. 메타분석 결과
과제 기반의 로봇 상지 재활치료가 뇌졸중 환자의 운 동기능과 ADL 수행능력에 미치는 영향을 메타분석을 통 해 정량적인 통합분석을 실시했다. 상지의 운동기능에 대한 연구들은 대상자의 종류, 연구 설계, 각 개별 평가도 구들의 결과측정 등이 모두 유사한 모집단 효과크기를 공유하고 있었기 때문에 고정효과 모형을 사용하였다. ADL 수행능력에 미치는 효과의 경우 대상자의 종류와 중재방법 등이 유사한 목적을 가지고 수행되었으나, MAL은 손상측의 사용빈도와 움직임의 질에 대한 측정 을 기반으로 하고, ABILHAND는 일상생활에서의 실제 조작능력을 평가하는 도구로써 FIM이나 Bathel Index에 비해 측정방식과 평가항목이 상이하여 통계량의 비동질 성이 노출되었기 때문에 변량효과 모형(random effect model)을 선택하였다.
1) 상지의 운동기능에 미치는 효과
전체 상지 기능평가는 실험군이 452명, 대조군이 370 명으로 집계되었으며 효과크기 2.63(mean difference: 0.34, 95.0% CI: -0.30~4.38, p<.05, I2=65.0%)으로 대조군에 적용된 중재에 비해 유의한 차이가 있었다. FMA 결과는 효과크기 2.98(mean difference: 2.10, 95.0% CI: 0.72~3.48, p<.05, I2=52.0%)였고 유의한 차이를 보였다. WMFT의 결과는 효과크기 1.85(mean difference: 0.25, 95.0% CI: -0.02~0.51, p>.05, I2=80.0%)으로 효과가 없는 것으로 나타났고, BB는 효 과크기 2.25(mean difference: 2.34, 95.0% CI: 0,30~ 4.38, p<.05, I2=28.0%)로 과제기반의 로봇 상지 재활 치료가 상지의 운동기능향상에 효과가 있는 것으로 나타 났다(Figure 5).
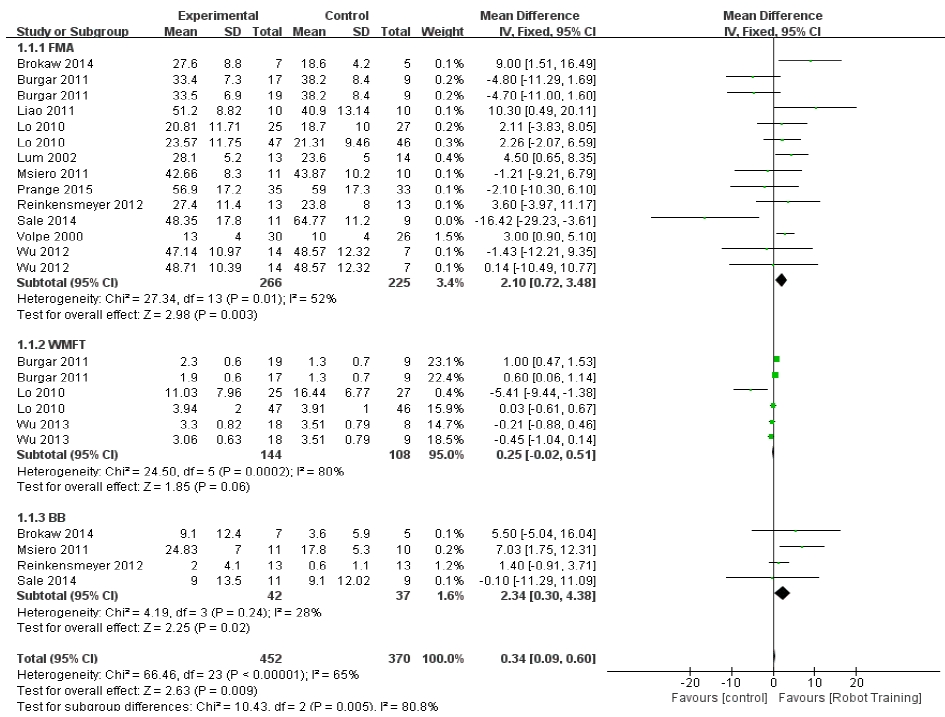 Figure 5Forest Plot in Effect of Task-oriented Robot-Assistive Therapy on Motor Function
Figure 5Forest Plot in Effect of Task-oriented Robot-Assistive Therapy on Motor Function
2) ADL 수행능력에 미치는 효과
전체 ADL 수행능력에 대한 분석에서 효과크기 1.88(mean difference: 0.72, 95.0% CI: -0.03~1.47, p>.05, I2=78.0%)로 통합 추정치가 통계적인 유의성을 갖지 못하였다. FIM평가도구의 경우 효과크기 3.04 (mean difference: 4.14, 95.0% CI: -1.47~6.80, p<.05, I2=73.0%)로 실헙군과 대조군 사이에 결과값의 유의한 차이를 보였다. MAL은 효과크기 0.14(mean difference: -0.04, 95.0% CI: -0.58~0.50, p>.05, I2=6.0%), ABILHAND는 효과크기 0.77(mean difference: -0.09, 95.0% CI: -0.72~0.53, p>.05, I2=55.0%)를 보여 차이의 통계적인 유의성을 갖지 못하 였다(Figure 6).
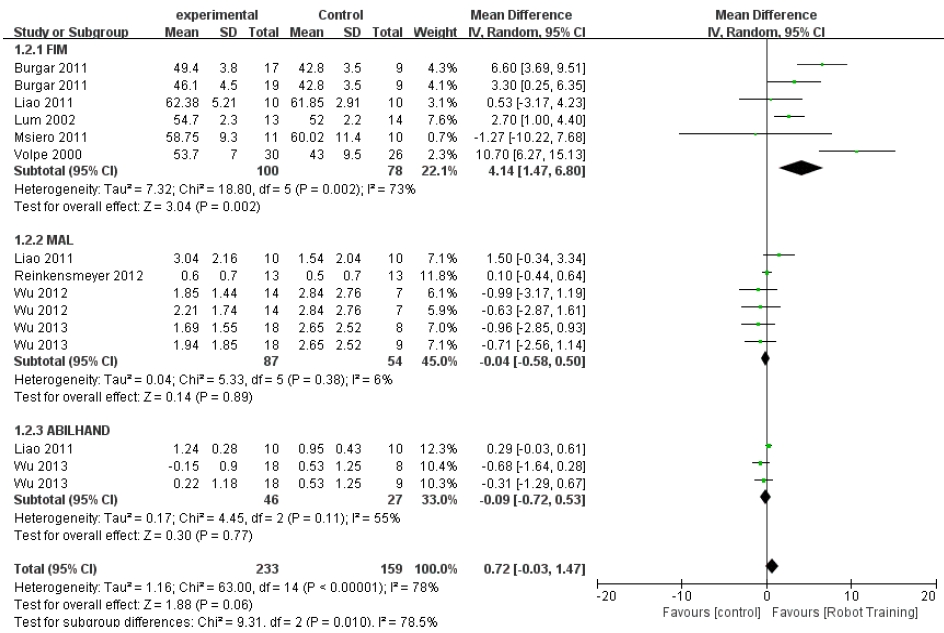 Figure 6Forest Plot in Effect of Task-Oriented Robot-Assistive Therapy on ADL Performance
Figure 6Forest Plot in Effect of Task-Oriented Robot-Assistive Therapy on ADL Performance
3) 출판 편의
운동기능 평가에서 4개의 값을 제외하고 대부분의 연 구들은 대칭적이면서 효과추정치 부근에 산포되었으나 첨점 부근에 분포함으로써 치료의 효과가 적을 수 있는 가능성에 대한 미출간 자료 출판편향이 존재했다.
ADL 수행능력에서 3개의 값들을 제외하고 나머지는 모두 영역 내 분포하는 경향을 보였고, 10개 값 이상의 값들이 좌측에 편향되는 비대칭적 경향을 보이고 대부분 의 연구가 funnel의 첨부에 분포하는 경향을 보였다 (Figure 7).
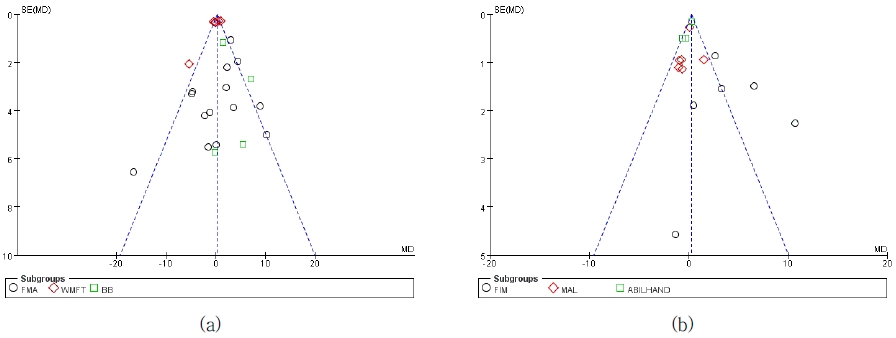 Figure 7Funnel Plot of Motor Function(a) and ADL Performance(b)
Figure 7Funnel Plot of Motor Function(a) and ADL Performance(b)
Ⅳ. 고 찰
본 연구에서는 과제기반의 로봇 상지재활치료를 받은 뇌졸중 환자를 대상으로 운동기능과 ADLL수행능력에 증진이 있었는지 그 효과여부를 알아보기 위해 RCT연구 12편을 최종 선정하여 체계적 고찰과 메타분석을 실시하 였다.
운동기능의 전반적인 효과는 유의한 것으로 파악되었 으나 FMA, BB와는 달리 WMFT에서는 중재군과 대조 군사이 차이는 있었으나 통계적으로 유의하지 못했다. WMFT는 다른 평가도구들과 달리 CIMT의 치료효과에 중점을 둔 도구이면서 장악력(grip strength)을 직접적 으로 측정하는 항목을 포함 하는 등 상이한 점이 존재하 여 다른 평가도구들과 차이를 보일 수 있다는 Prange 등 (2009)의 견해와 일치한다.
[Volpe 등(2000)]의 연구에서는 모니터 상에 제공되는 선형정보를 환자가 직접 관찰하고 도형이나 그림 위 경 로(trajectory)를 따라 움직이는 과제를 수행토록 했으 며 특히, 마치 치료사의 손이 옆에서 도와주는 듯한 (hand-over-hand) 효과를 낼 수 있는 역구동(backdriveability) 방식의 로봇 상지재활치료가 시행되었다. [Lo 등(2010)]은 12주의 중재 과정 중, 어깨, 팔꿈치, 손 목, 손의 순서로 로봇 팔에 의한 선형 움직임을 3주간 수 행하는 치료를 적용했다. 목표지향적인 치료로 [Burgar 등(2011)]은 목표물(target)에 대한 정적/동적 추적 (static and dynamic tracking), 뻗기(reaching), 자가 관절가동범위 훈련(self range-of-motion tasks)으로 세분화하였다. 3차원 공간을 이용한 연구로는 케이블로 고정된 현가장치가 설치된 로봇 팔로 3차원의 자유도 내 모든 움직임을 훈련한 연구가 있었다([Masiero et al., 2011]). [Lum 등(2002)]이 제시한 연구에서는 능동 보조 (active-assisted)와 능동 억제(active-constraint)의 두 가지 모드를 이용하여 양손 움직임의 거울효과를 적 용한 과제 중심의 로봇 중재가 시행 되었다. Wu 등 (2013)의 연구도 유사한 훈련을 진행하였으며 [Liao 등 (2011)]은 전적으로 로봇에 의하여 구동되는 수동-수동 (passive-passive), 비손상측의 로봇 움직임에 영향을 받아 구동되는 수동-능동(passive-active), 움직임 시 작 최초에 저항이 부여되는 능동-능동(active-active), 손상 측 상지에 의해 모든 움직임이 견인되는 능동-수동 (active–passive)의 4단계 모드(mode) 범위 안에서 로봇 상지 중재가 시행되었다. [Sale 등(2014)]의 연구와 [Brokaw 등(2014)]도 3차원 가상현실 범위 안에서 목표 물에 대한 뻗기, 잡기, 가져 오기 등의 동작을 손상측에 착용한 로봇을 통해 훈련하였다. ROM arc라는 일반적인 치료를 가상현실 속에서 유사한 3차원 활동으로 전환하 여 해당 로봇 팔 커서의 움직임을 통해 점수를 획득하는 과제 기반 로봇 연구도 수행되었다([Prange et al., 2015]). 일상생활에 보다 가까운 활동기반의 훈련으로 [Reinkensmeyer 등(2012)] ‘Vu’라는 이름의 자체 게이 밍 소프트웨어를 로봇팔과 함께 연동시켜 3차원 상의 가 상 물체를 직접 조작하는 실험을 진행했다. 예를 들어, 선반에 진열된 물건을 꺼내서 카트에 집어넣기(grasping objects off of a shelf and dropping them into a grocery cart)와 같은 ADL을 로봇팔의 보조적인 움직 임으로 구현한 것이 특징이다. 로봇 치료에 대한 연구는 화면에 제시되는 2차원적 게임이나 움직임을 세분화해 서 구현한 로봇 치료에서 최근에 이를수록 가상현실 (Virtual Reality; VR)과 결합한 로봇연구로 변화하는 경향을 보였다.
ADL 수행능력은 전체 통합 추정치를 비롯하여 MAL, ABILHAND 등의 도구에서도 효과는 없는 것으로 나타 났고 FIM에서만 유의한 차이를 보였다. 전통적인 ADL 평가도구인 FIM이나 Bathel Index와는 달리 MAL, ABILHAND 등은 ADL의 수행여부에 대한 부분보다는 손상측의 사용빈도와 움직임의 질에 대한 측정을 더 중 시하거나, 일상생활에서의 실제 조작능력을 점수화하고 평가하는 도구의 목적이 강하기 때문인 것으로 추론된다 ([Liao et al., 2011;] [Wu et al., 2013]). 이들 평가는 개별 연구들에서 연구자들이 ADL 수행능력을 평가하기 위한 도구로써 사용을 하였기 때문에 본 연구에서 통합적인 자료의 합성에 포함시켰다.
로봇의 상지 재활 치료 중 전기자극과 함께 이루어지 거나 실제 물체를 로봇의 외압에 의해 움직이는 훈련을 중심으로 하는 연구들은 본 분석에 포함시키지 않았다 ([Daly et al., 2005;] [Hellman, Chang, Tanner, Helms, & Santos, 2015;] [Timmermans et al., 2014]). 로봇재활은 짧은 역사에도 불구하고 연구들마다 독자적인 플랫폼과 연구 설계를 바탕으로 진행되는 경향이 현저하여 본 연 구를 위한 자료의 합성에 존재할 데이터 혼란의 우려로 임상적 실험연구 중에서도 RCT만을 선별하였다.
기존의 메타연구에서 일반적인 작업치료와 로봇 재활 치료에서 보이는 운동기능의 회복, ADL 수행능력, 근력, 운동조절 등의 지표에서 효과 차이가 없고 작업치료사에 의한 집중적인 치료가 오히려 상지기능의 회복에 더 효 과적일 수 있다는 연구가 제기된 반면, [Mehrholz, Hӓ drich, Platz, Kugler와 Pohl (2012)]은 로봇 상지 치료 가 상지의 기능과 ADL 수행능력에 더 효과가 있었고 근 력의 증진에는 효과가 없는 것으로 결과를 보고했다 ([Norouzi-Gheidari, Archambault, & Fung, 2012]). 이렇게 상이한 결과를 보이는 이유는 과제와 함께 진행 되는 치료와 그렇지 않은 로봇치료를 구분하지 않고 자 료를 합성하였기 때문인 것으로 판단된다. 차후 질적으 로 높은 수준의 메타분석을 위해서 실험결과를 개념적인 회복의 척도로 그룹화 하여 분석하기 보다는 표준화된 평가도구를 중심으로 RCT분석이 이루어져야 그 효과의 예측이 보다 객관적일 수 있을 것이며, 이는 과학적인 임 상결정의 근거기반마련에 도움이 될 것으로 예상된다 ([Uetani, Nakayama, Ikai, Yonemoto, & Moher, 2009]).
현재까지 로봇을 이용한 상지의 재활치료를 대상으로 한 RCT 연구의 편수는 기존의 다른 연구들에 비해 상대 적으로 적고 대규모 연구도 많지 않아 확증적인 분석결 과를 얻기에는 제한이 있으나, 본 연구를 비롯하여 기존 의 메타분석을 토대로 판단했을 때 전반적인 치료효과의 가능성이 존재한다([Hellman et al., 2015]). 특히, 가상현 실이 수반되는 등 최근의 경향이 반영된 과제기반의 로 봇 재활치료는 지금까지 문헌수가 제한적이므로 중재방 법을 구체화하고 각 지표의 장기적인 결과 변수에 대한 추가적인 연구가 필요할 것이다.
Ⅴ. 결 론
본 연구에서는 뇌졸중 환자에게 시행한 과제 기반의 로봇 상지재활치료의 효과에 대하여 체계적 고찰과 메타 분석의 방법을 통해 근거를 제시하고자 하였다. 중재의 효과 중에서도 상지 운동 기능과 ADL 수행능력에 미치 는 영향을 알아보았고 상지 기능 증진에 효과가 있는 것 으로 나타났다. ADL 수행능력 결과 지표 중에서 FIM에 서는 회복에 긍정적인 영향을 주는 것으로 파악되었다. 본 연구의 결과를 토대로 로봇 상지재활 치료에 대한 임 상적 근거를 제시할 수 있으며 임상가들이 중재방법을 선정할 때 의사결정에 도움을 제공해 줄 수 있을 것이다.