Journal Information
Article Information
급성기 뇌졸중 환자에서의 로봇 보조 상지 훈련의 효과 : 무작위 대조 예비 연구
Author Information
Objective :
This study was to determine the effect of Robot-assisted Upper limb Training in patients with acute stroke.
Methods :
Fourteen inpatients were randomly allocated into the experimental group (n=7), who received Robot-assisted Upper limb Training, and the control group (n=7), who received a conventional occupational therapy. Each intervention consisted of a 30 min session once a day, five times a week, for four weeks. To measure the functions of the upper limbs and performance capacities in the activities of daily living and grip power, the Fugl-Meyer assessment-Upper Extremity (FMA-UE), Manual Function Test (MFT), Korean-Modified Barthel index (K-MBI), Grip power were used before and after the intervention.
Results :
After intervention, both the groups showed significant increased FMA-UE, MFT, K-MBI, Grip power (p<.05). But change values in terms of FMA-UE, MFT, K-MBI, Grip power exhibited a no statistically significant difference compared with conventional group (p>.05).
Conclusion :
In patients with upper limb deficits after acute stroke, the Robot-assisted upper limb training was an effective intervention method to facilitate motor and functional recovery of upper limb. Therefore, robot-assisted upper extremity training can be used as an intervention method to support standardized treatment using stable equipment from the beginning of the upper extremity rehabilitation of stroke patients.
목적 :
본 연구는 급성기 뇌졸중 환자에서 로봇 보조 상지 훈련의 효과를 알아보고자 실시하였다.
연구방법 :
2015년 6월 1일부터 2015년 8월 30일까지 전북 익산 소재의 W 대학병원에 입원한 급성기 뇌졸중 환자 14명을 실험군과 대조군으로 무작위 할당하였다. 두 군 모두 전통적인 작업치료를 실시하였다. 추가적으 로 실험군에는 로봇 보조 상지 훈련을 대조군은 전통적 작업치료를 각 1일 1회 30분, 주 5회, 총 4주간 실시하였 다. 치료 중재 전·후 상지기능을 측정하기 위해 Fugl-Meyer 평가척도(Fugl-Meyer Assessment-Upper Extremity; FMA-UE), 상지 기능 검사(Manual Function Test; MFT)을 사용하였고 일상생활활동 수행능 력을 평가하기 위해 한국판 수정된 바델 지수(Korean version of Modified Barthel Index; K-MBI)을 사용하였고 장악력을 평가하기 위해 Jamar dynamometer을 사용하였다.
결과 :
4주 치료 후 두 그룹 모두에서 중재 전·후 상지 기능, 일상생활활동 수행능력, 장악력에서 유의한 차이가 나타났으며(p<.05) 중재 후 두 그룹 간 변화량의 차이에서는 모두 유의한 차이가 나타나지 않았 다(p>.05).
결론 :
본 연구 결과 로봇 보조 상지 훈련이 급성기 뇌줄중 환자의 상지 기능, 일상생활활동 수행력, 장악력 을 향상 시킬 수 있는 중재 방법으로 나타났다. 그러므로 로봇 보조 상지 훈련은 뇌졸중 환자의 상지 재 활에 초기부터 안정적이고 신뢰적인 장비로 표준화된 치료를 지원할 수 있는 중재 방법으로 사용될 수 있을 것이다.
Ⅰ서 론
뇌졸중은 뇌 조직에 혈액을 공급하는 뇌혈관이 막히거 나 터져서 발생하는 질환으로 신체 전반에 걸쳐 다양한 신경학적 장애를 유발한다([Chang, Tung, Wu, & Su, 2006]). 뇌졸중 환자의 85% 에서 운동, 감각, 지각 및 인 지장애 등을 포함한 편마비 증상이 나타나며 그 중 69% 이상의 환자에서 상지 기능 장애가 유발된다([Luke, Dodd & Brock, 2004]; [Wolf et al., 2001]). 특히 뇌졸중 발병 초기에 마비측 상지의 심각한 운동장애를 보이는 환자 중 20% 정도에만 상지기능이 일부 회복되었고 5% 미만에서 상지기능이 완전 회복되므로 상지 기능 회복은 긍정적이지 못한 편이다([Hayward, Barker, & Brauer, 2010]). 뇌졸중 환자의 상지 기능 장애는 조작하기, 먹기, 쓰기, 씻기, 기기, 걷기, 균형 등과 같이 인간의 삶에 가장 기본적인 일상생활동작을 방해하는 주요 원인으로 작용 하기 때문에 환자의 사회적 독립성을 방해하고 삶의 질 저하를 초래한다([Michaelsen, Dannenbaum, & Levin, 2006]). 또한 인간의 상지는 위험한 상황에서 자신을 보 호하는 수단, 의사표현의 수단, 다양한 인지 활동에도 중 요하게 사용된다([Buccino, Solodkin, & Small, 2006]). 따라서 뇌졸중 환자에게 있어 상지 기능의 회복은 인간 으로써 살아가는데 필요한 독립적 일상생활을 수행하는 데 있어 하지의 보행 기능 못지않게 중요하다고 볼 수 있 다([Sheng & Lin, 2009]). 뇌졸중 환자의 운동능력 및 기 능수준의 회복은 발병 초기에 가장 많이 일어나고 발병 후 3~6개월까지는 점차적으로 향상된다고 하였다 ([Chambers, Norris, Shurvell, & Hachinski, 1987]). 이는 뇌졸중 환자들의 기능 향상을 극대화시키기 위해 다양한 치료적 접근법도 중요하지만 회복력이 가장 뚜렷 한 발병 초기 환자들을 대상으로 시행되는 재활치료는 시기적으로 중요한 의미를 갖는다는 점을 시사한다 ([Hashimoto, Higuchi, Nakayama, & Abo, 2007]).
상지 기능은 대부분 항 중력 방향으로 일어나기 때문 에 하지에 비해 더 많은 근력과 관절 간 협응력 및 조절력 이 요구된다([Roh, Rymer, Perreault, Yoo, & Beer, 2013]). 하지의 일반적 움직임이 유각기와 입각기가 반 복되는 보행이라면 상지는 들어올리기, 팔 뻗기, 조작기 능이라고 할 수 있다([Krabben et al., 2012]). 어깨관절 복합체는 견갑골을 중심으로 근육 간 협력수축과 동적 조절력을 통해 근위부의 안정성을 제공하는데 뇌졸중으 로 인한 다양한 신경학적 손상은 상지 움직임 시 굴곡과 신전의 불수의적인 근 시너지를 발생시켜 의도한 수의적 움직임을 수행하지 못하여 수의적 움직임 수행에 있어 실패를 경험한다([Kung, Lin, & Ju, 2010]). 비정상적인 골곡 시너지는 주관절의 토크를 발생시켜 신전을 제한하 고 상지 거상을 어렵게 하여 시간이 경과될수록 어깨관 절 주변 근육에 무용성 근 위축을 초래할 수 있다 ([Krabben et al., 2012]). 그러므로 환측 상지에 일부 기 능이 잔존해 있더라도 사용하지 않게 되고 건측 상지를 습관적으로 더 사용하게 되는 학습된 무용(disuse)현상 이 발생한다([Chang et al., 2006]).
뇌졸중 환자의 상지기능 회복을 위해 시행된 치료적 접근법으로는 신경생리학적 운동접근법, 과제 지향적 접 근법, 강제유도운동치료, 가상현실을 이용한 상지훈련, 거울치료 등이 실시되고 있으며 이런 방법들은 상지 기능 향상에 효과성이 입증되었다([Klimkiewicz, Kubsik, Jankowska, & Woldańska-Okońska, 2014]; [Peurala et al., 2012]; [Samuel, Oey, Van Dongen, & Ng, 2016]; [Thieme, Mehrholz, Pohl, Behrens, & Dohle, 2013]; [Winstein et al., 2016]). 그러나 신경생리학적 운동접근 법은 운동 중 환자에 대한 생리적 정보를 정량적으로 얻기 어렵고 치료사 간 차이가 많으며 강제유도운동치료는 건 측 상지의 사용제한으로 근 위축과 심리적 압박감이 유발 될 수 있어 치료에 대한 거부감과 손 기능에 대한 효과는 상대적으로 떨어져 이에 대한 치료가 필요하며 거울치료 는 단독으로 사용되기 보다는 다른 치료와 결합되었을 때 치료의 효과가 더 크게 나타나는 제한점을 가지고 있다 ([Blanton, & Wolf, 1999]; [Cheng, Zhou, Zuo, & Fan, 2011]; [Thieme et al., 2013]).
최근에는 생활수준의 향상과 과학의 발달로 재활 분야 에 로봇이 활용되고 있는데 그 중 상지 로봇은 상지에 부 과되는 중력을 보상해 줌으로써 비정상적인 패턴의 근 시너지 감소와 선택적 움직임을 촉진할 수 있는 환경을 제공할 수 있으며 다양한 종류의 운동과 강도 조절이 가 능하며 집중력과 동기유발을 높일 수 있는 치료 방법으 로, 과제지향적인 운동을 통해 운동 학습에 기여하는 것 으로 알려져 있다([Sale et al., 2014b]). 로봇 보조 상지 치료 효과에 대한 연구 중 아급성 뇌졸중 환자들을 대상 으로 한 연구에서 실험군에 1일 30분, 주 5회, 총 4주 동안 로봇치료를 시행한 결과 실험 전·후 유의한 향상 을 보였으나 전통적인 작업치료만 시행한 대조군과 비교 에서는 유의한 차이가 없다고 하였다([Joo et al., 2014]). 그러나 [Lum, Burgar, Van der Loos, & Shor (2006)] 에서는 아급성 뇌졸중 환자에게 상지 재활 로봇치료가 전통적 치료에 비해 운동 기능을 향상하는데 있어 효과 적이라고 보고하였다. 이런 결과의 차이는 적용한 로봇 의 종류, 치료 시작 시점, 운동프로그램의 강도 및 적용기 간에 따라 달라질 수 있다([Joo et al., 2014]). 그러나 아 직까지 국내에는 급성기 뇌졸중 환자를 대상으로 한 상 지 재활 로봇 연구는 부족한 상태이다. 따라서 본 연구는 발병 1개월 이내의 급성기 뇌졸중 환자를 대상으로 로봇 보조 상지 훈련이 상지 기능과 일상생활활동 수행능력에 미치는 효과를 알아보고자 하였다.
Ⅱ연구 방법
1연구 대상
본 연구는 2015년 6월 1일부터 2015년 8월 30일까 지 3개월 동안 전북 익산에 위치한 W대학 병원 재활의학 과에 입원치료 중인 급성기 뇌졸중 환자 14명을 대상으 로 실시하였다. 연구대상자는 본 연구의 선정기준에 부 합되는 자로 본 연구의 목적과 절차에 대한 충분한 설명 을 듣고 실험 참여에 자발적으로 서면 동의한 자를 대상 으로 하였다. 대상자의 선정 및 제외 기준은 다음과 같다.
1)선정 기준
(1)
뇌졸중으로 진단 받은 지 1개월 미만인 환자 중 재발되지 아니한 자.
(2)도수근력평가에서 마비측 어깨관절 근위부의 근 력이 중력 제거 상태에서 능동적 관절 운동이 가 능한 Poor 이상인 자.
(3)수정된 Ashworth 척도(Modified Ashworth Scale; MAS)가 2 미만인 자.
(4)한국형 간이정신상태 판별검사(Korean Mini- Mental State Examination; MMSE-K) 점수가 24점 이상인 자.
2)제외 기준
(1)
정형외과적 문제, 피부질환, 심혈관 질환이 있 는 자.
(2)로봇 치료를 적절히 수행할 수 없는 기저질환이 있는 자.
2연구 도구
1)장악력 검사
장악력 검사는 쥐기(power grip)로 측정하였다. 쥐기 검사는 악력 측정은 Sammons Preston사에서 개발한 Jamar dynamometer를 이용하여 측정하였다. 측정 자 세는 미국 수부치료사협회에서 제시한 자세로 앉은 상태 에서 어깨관절을 내전시켜 몸통에 붙이고 주관절은 90 도 굴곡, 전완은 중립위, 손목은 0~30도, 0~15도 내 척 측 편위가 되도록 하였다. 검사로인해 피로를 느끼지 않 게 하기 위해 각 측정 사이에 20초간의 휴식시간을 두었 다. 측정은 비마비측 부터 시작하여 좌, 우 양측을 각각 총 3회씩 측정하여 평균값을 기록하였다([Mathiowetz et al., 1985]).
2)Fugl-Meyer 평가 척도 (Fugl-Meyer Assessment; FMA)
FMA는 뇌졸중 환자의 운동기능, 균형, 감각 관절 가 동범위, 통증의 정도를 양적으로 평가하기 위해 고안된 측정도구이다([Fugl-Meyer, Jääskö, Leyman, Olsson, & Steglind, 1974]). 상지와 하지 두 영역으로 나누어져 있고 평점은 개별로 사용 된다. 본 연구에서 사용한 상지 영역의 세부 항목에는 어깨, 팔꿈치, 아래팔이 있고 각각 18항목, 손목5항목, 손(손가락)7항목으로 이루어졌으며 상지 협응능력은 3항목 이었다. 마비측과 비마비측을 3 회씩 실시하여 높은 점수를 채택하였으며 수행정도에 따 라 0~2점을 부여하였다(0점은 수행하지 못함, 1점은 부 분적으로 수행함, 2점은 완전 수행함). 상·하지 모두 포 함한 전체 점수는 100점으로 상지에 해당하는 검사는 33항목으로 최대 66점이며 회복 정도를 백분율로 나타 낼 수도 있다([Duncan et al., 1994]). 측정자 간 신뢰도 와 측정자 내 신뢰도는 .94와 .99로 높은 신뢰도가 보고 되었으며 상지 영역의 검사만을 시행하였을 경우도 검사 자 간 신뢰도가 .96으로 높은 신뢰도를 보였다([Sanford, Moreland, Swanson, Stratford, & Gowland, 1993]).
3)상지 기능 검사(Manual Function Test; MFT)
뇌졸중 환자의 상지 기능 검사 도구인 MFT는 일본 동 북 대학 의학부 리하연구소에서 개발한 검사도구이다. 뇌졸중 환자의 조기 재활 중 상지 기능 및 동작 능력 측정 에 주로 사용되며 짧은 시간 동안에 측정할 수 있다는 장 점이 있다. 검사 항목으로는 상지 운동 4항목, 손을 쥐는 힘 2항목, 손가락 조작 2항목이 있다. 세부 항목마다 수 행 시 1점, 불가능할 시 0점으로 기록하는데 어깨 굽힘(4 점), 어깨 벌림(4점), 후두부에 손 닿기(4점), 등에 손 닿기(4점), 쥐기(3점), 집기(3점), 입방체 운반(4점), 페그 보드에 꽂기(6점)로 총점은 32점 만점으로 한다 ([Nakamura & Moriyama, 2000]). 검사자간 신뢰도와 검사-재검사 신뢰도는 .95으로 높게 보고되고 있다 ([Miyamoto, Kondo, Suzukamo, Michimata, & Izumi, 2009]).
4)한국판 수정된 바델 지수 (Korean version of Modified Barthel Index; K-MBI)
기본적 일상생활활동의 기능적 수준을 평가하는 도구 로 K-MBI는 Shah, Vanclay와 Cooper (1989)이 개정 한 수정된 바델 지수(Modified Bathel Index; MBI) 제 5판을 한국 상황에 맞게 일부 항목을 수정 및 보완하여 표준화 한 것이다([Shah et al., 1989]). 수정된 바델 지수 는 총 10가지 항목으로 구성되어 있으며 각 항목별 점수 는 5점 척도로 총점은 100점이다. 100점 만점으로 0~24점은 완전 의존성, 25~29점은 최대 의존성, 50~74점은 부분 의존성, 75~90점은 약간 의존성, 91~99점은 최소 의존성, 100점은 완전 독립성을 의미 한다. 검사자 간 신뢰도는 .95, 검사-재검사 신뢰도는 .89로 보고되고 있다([Granger, Albrecht, & Hamilton, 1979]).
3치료 중재
1)로봇 보조 상지 훈련 (Robot-Assisted Upper Limb Training; RAULT)
본 연구의 상지 로봇은 Hocoma사에서 개발한 Armeo ⓇSpring을 사용하였다. 로봇 훈련은 해당 회사로부터 로봇사용 방법에 대한 교육을 이수하고 자격증을 부여 받은 경력 5년 이상의 작업 치료사가 시행하였다. 훈련 전 환자에게 충분한 설명과 주의사항을 교육 한 후 손잡 이 위치, 하부 팔의 길이, 상부 팔의 길이를 조정하여 마 비된 팔을 로봇 외골격에 착용 후 팔굽 관절이 90도 굴곡 이 가능하고 팔꿈치 동작 축과 팔꿈치 관절이 일직선이 되는지 확인하였다. 환자의 초기 중력 보상의 정도는 마 비측 상지에서 어깨관절 45도 굴곡과 팔굽 관절 90도 굴 곡의 표준화 된 자세를 유지하는 능력을 기초로 하였으 며 편안한 손위치를 위해 핸드 모듈을 조정하였다. 핸드 모듈의 잠금 장치를 통해 내전 및 외전 동작을 방지 하였 으며 모든 조절 지표들은 매주 첫 번째 훈련을 통해 환자 의 근력, 기능 상태에 대한 지표들에 따라 적절하게 설정 하였다. 각 프로그램은 개인의 상태와 목적에 맞게 설정 되었으며 어깨, 팔굽, 전완 및 손에 있는 관절들을 사용하 면서 과제 지향적 운동을 할 수 있도록 선정하였다. 특히 프로그램은 뻗기, 들어 올리기, 옮기기, 펴기, 쥐기 등의 연결성이 있는 기능적 동작을 통해 강화될 수 있거나 훈 련될 수 있도록 하였다. 운동의 강도는 운동자각도를 이 용하여 1~2주차에서는 RPE 13(약간 힘들다)에서 3~4 주에서는 RPE 15(힘들다)로 조절 하였다. 훈련은 1일 30분, 주 5회, 4주간 총 20회를 시행 하였다(Figure 1).
 Figure 1.Robot-Assisted Rehabilitation Therapy
Figure 1.Robot-Assisted Rehabilitation Therapy
2)실험 장비
본 연구에 사용된 ArmeoⓇSpring 상지 로봇은 뇌졸 중, 외상성 뇌손상 및 신경학적 손상 등으로 마비나 장애 가 있는 상지 재활을 위해 고안된 장비로 집중적이고 고 강도의 반복적인 훈련을 제공할 수 있다. 스프링 원리를 이용해 상지 무게를 조절할 수 있으며 특정 운동을 수행 하는 동안 중력을 보상하여 팔을 보조해 주는 시스템이 다. 이는 환자들로 하여금 남아있는 상지의 능동적 움직 임과 기능적 수준을 점진적으로 증가시킬 수 있는 기회 를 제공해준다. 로봇 관절은 어깨 3개, 팔굽 1개, 전완 1개로 총 5도의 자유도를 가지며 3차원 공간에서의 다양 한 능동적 움직임이 가능하고 압력에 민감한 손 쥐기 동 작을 통해 단계적인 쥐기와 펴기 동작을 수행할 수 있다. 위치 센서와 소프트웨어를 통해 제공되는 가상현실 학습 환경은 훈련 중 청각 정보와 시각적 되먹임을 제공하여 기능적 과제를 달성하게 해준다. 가상현실 프로그램은 과제 지향적 접근법으로 구성되어 있으며 움직임의 방향, 속도, 범위에 따라 다른 수준의 난이도를 제공한다. 환자 의 능동적 움직임 수준에 따라 훈련 공간을 보정할 수 있 으며 움직임에 대한 저항, 근력, 관절가동범위, 협응력에 대한 정보가 제공되며 이러한 정보를 통해 각 개인에 맞 는 적합한 운동 프로그램을 제공할 수 있다(Figure 1).
4연구 절차
연구 대상자는 2016년 6월 1일부터 2016년 8월 30 일까지 19명의 대상자 중 본 연구의 선정기준에 부합하 는 14명의 환자를 대상으로 하였다. 검사 결과에 부합되 는 급성기 뇌졸중 환자 14명을 대상으로 Matlab 소프트 웨어의 무작위 난수 발생 기능을 이용하여 무작위로 로 봇 보조 상지훈련을 하는 실험군(7명)과 일반적 작업 치 료를 시행하는 대조군(7명)으로 나누어 배정하였다. 중 재 전 사전평가와 중재 후 사후평가는 5년 이상의 임상경 력을 가진 동일한 작업치료사가 실시하였다. 실험에 참 가한 모든 대상자는 신경생리학적 이론에 근거한 관절가 동범위 증진 훈련, 과제 지향적 훈련, 일상생활활동 훈련 을 포함한 일반적 작업치료를 회복 단계에 맞게 실시하 였고 추가적으로 실험군은 1일 1회 30분, 주 5회, 4주간 로봇 보조 재활 훈련을 실시하였고 대조군에는 1일 1회 30분, 주 5회, 4주간 일반적 작업치료를 실시하였다. 전 반적인 연구 절차는 다음과 같다(Figure 2).
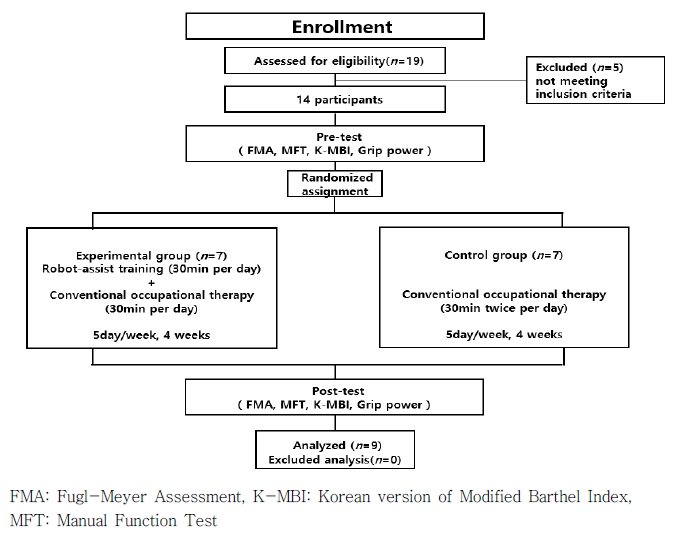 Figure 2.Flow Diagram
Figure 2.Flow Diagram
5분석 방법
측정하여 수집된 자료는 SPSS Version 19.0 통계 프 로그램을 이용하여 분석하였다. 중재 전 실험군과 대조 군의 일반적 특성은 기술통계량을 이용해 평균과 표준편 차를 제시하였고 동질성 검정을 위해 명목척도는 χ2과 순서척도는 맨 휘트니(Mann-Whitney) U 검정을 이용 하였다. 두 군간 비교를 위해서 맨 휘트니(Mannhitney) U 검정을 이용하였고 군 간 중재 전후를 비교하 기 위해서 비모수 검정 방법인 윌콕슨 부호순위 (Wilcoxon Signed-ranks) 검정을 이용하였고 두 군별 각 측정 변수들의 중재 전후 비교와 중재 전후 변화량을 비교하기 위해 맨 휘트니(Mann-Whitney) U 검정을 이 용하였다. 통계적 유의 수준 p값은 .05로 하였다.
Ⅲ연구 결과
1연구 대상자의 일반적 특성
연구 대상자의 일반적 특성은 Table 1과 같다. 중재 전 두 군간 일반적 특성에 대한 동질성 검증을 실시한 결 과 통계학적 유의한 차이가 없었다(p>.05)(Table 1).
| Characteristics | Pre-treatment | χ 2/z (p) | ||
|---|---|---|---|---|
| RAULT group (n=7) | CTL group (n=7) | |||
| Gender (n) | Male | 5 | 4 | 1.14 (.29) |
| Female | 2 | 3 | ||
| Affected side (n) | Left | 3 | 2 | .29 (.59) |
| Right | 4 | 5 | ||
| Onset duration (day, M ± SD) | 17.71 ± 1.49c | 17.86 ± 1.34 | -.19 (.84) | |
| Age(yr, M ± SD) | 58.86 ± 9.17 | 60.57 ± 5.62 | -.26 (.79) | |
| Body weight(kg, M ± SD) | 59.93 ± 9.22 | 59.91 ± 8.04 | -.06 (.94) | |
| MMSE-K(score, M ± SD) | 26.86 ± 1.77 | 25.71 ± 0.75 | -1.33 (.18) | |
2두 군간 중재 전·후 상지 기능, 일상생활 활동 수행능력, 장악력 수준 비교
두 군에서 중재 전에 측정된 FMA, MFT, K-MBI, Grip power 점수들은 동질성 검사에서 유의한 차이가 없었다(p>.05)(Table 2). 두 군간 중재 전과 후를 비교 한 결과 두 집단 모두에서 측정된 FMA, MFT, K-MBI, Grip power 에서 유의한 차이가 나타났다(p<.05) (Table 2).
| Items | Assessment | RAULT group (n=7) | CTL group (n=7) | z(p) |
|---|---|---|---|---|
| FMA-UE (score) | Pre-test (M ± SD) | 16.71 ± 2.14 | 15.57 ± 2.37 | -.97 (.33) |
| Post-test (M ± SD) | 31.00 ± 3.79 | 27.14 ± 2.27 | -1.92 (.06) | |
| z(p) | -2.38 (.01*) | -2.38 (.01*) | ||
| MFT (score) | Pre-test (M ± SD) | 13.43 ± 2.69 | 11.86 ± 2.34 | -1.16 (.24) |
| Post-test (M ± SD) | 22.43 ± 3.45 | 19.43 ± 1.98 | -1.63 (.10) | |
| z(p) | -2.37 (.02*) | -2.38 (.02*) | ||
| K-MBI (score) | Pre-test (M ± SD) | 31.00 ± 4.76 | 27.43 ± 3.86 | -1.35 (.17) |
| Post-test (M ± SD) | 54.00 ± 4.83 | 48.71 ± 3.54 | -1.86 (.06) | |
| z(p) | -2.37 (.01*) | -2.37 (.02*) | ||
| Grip power (kg) | Pre-test (M ± SD) | 3.29 ± 1.11 | 3.43 ± 1.27 | -.19 (.84) |
| Post-test (M ± SD) | 8.14 ± 2.85 | 8.00 ± 2.64 | -.32 (.81) | |
| z(p) | -2.37 (.01*) | -2.38 (.02*) |
3두 군간 중재에 따른 상지 기능, 일상생활 활동 수행능력, 장악력 변화량 비교
중재 후 두군 간의 상지 기능(FMA, MFT), 일상생활 동작 수행력(K-MBI), 장악력(Grip power)의 변화량 을 비교한 결과, 두 군간 유의한 차이가 나타나지 않았다 (p>.05)(Table 3).
| Items | RAULT group (n=7) M ± SD | CTL group (n=7) M ± SD | z(p) |
|---|---|---|---|
| FMA-UE(score) | 14.29 ± 2.50 | 11.57 ± 2.44 | -1.76 (.08) |
| MFT(score) | 8.86 ± 2.19 | 7.57 ± 1.39 | -1.18 (.23) |
| K-MBI(score) | 23.00 ± 3.37 | 21.29 ± 3.20 | -.85 (.39) |
| Grip power(kg) | 4.86 ± 2.03 | 4.57 ± 1.90 | -.65 (.52) |
Ⅳ고 찰
본 연구의 목적은 급성기 뇌졸중 환자를 대상으로 로 봇 보조 상지 재활훈련이 상지기능, 일상생활활동 수행 능력, 장악력에 미치는 효과를 알아보는 것이었다. 이를 위해 본 연구에 참여한 급성기 뇌졸중 환자를 대상으로 실험군에는 로봇 보조 상지 훈련과 일반적 작업치료를 각각 30분씩 적용하였고 대조군에는 일반적 작업치료를 30분씩 1일 2회 적용하였다. 본 연구에 사용된 Armeo ⓇSpring 상지 로봇은 대표적인 외골격 로봇으로 중력을 보상할 수 있어 근력 저하로 독립적인 상지 운동이 불가 능한 환자에게 능동적 훈련을 유도할 수 있다. 또한 모니 터를 통해 제공되는 가상현실은 과제 지향적 운동 학습 이론에 기초하여 다양한 수준의 반복훈련과 강도를 통해 최적의 상지 재활 환경을 제공한다([Kim, Park, Lee, & Seo, 2015]). 상지 로봇은 치료사에 의해 제공되는 일반 적인 작업치료에 비해 움직임에 대한 정확성이 매우 높 고 치료사의 지도 감독이 적은 상태에서 독립적인 훈련 을 지속적으로 수행할 수 있으며 수행능력을 객관적으로 측정할 수 있거나 측정도구로써의 기능 또한 내장되어 있기 때문에 재활치료 분야에 다양하게 사용될 수 있다 ([Sale et al., 2014a]). 본 연구의 결과에서 로봇 보조 상 지 훈련을 수행한 실험군과 일반적 작업치료를 수행한 대조군 모두에서 중재 후 검사 결과 상지 기능(FMAUE, MFT), 일상생활활동 수행력(K-MBI), 장악력 (Grip power) 수준이 유의하게 향상되었으나(p<.05) 치료 후 두 그룹 간 변화량을 비교한 결과 모든 측정 변수 에서 유의한 차이는 나타나지 않았다(p>.05). 급성기 뇌 졸중 환자를 대상으로 로봇 보조 상지 훈련을 시행한 기 존의 연구를 살펴보면 [Sale 등(2014a)]은 급성기 뇌졸중 환자 20명을 대상으로 주 5회 4주간 집중적인 상지 로봇 재활치료를 실시한 실험군과 집중적인 작업치료를 실시 한 대조군을 비교한 결과 두 군 모두 상지기능(FMAUE) 과 손의 굴근과 신근의 근력이 유의하게 향상되어 급성기 뇌졸중 환자의 상지 치료를 위해 로봇 치료가 안 정적이고 신뢰할 만한 장비임을 입증하였다. [Masiero, Celia, Rosati와 Armani (2007)]은 급성기 뇌졸중 환자 35명을 대상으로 어깨와 팔굽관절이 조절 가능한 상지 로봇 보조 재활훈련을 주 4시간, 5주간 실시하였고 일반 적 작업치료만 실시한 대조군에 비해 상지 기능과 상지 근력이 향상된 결과가 나타나 로봇 보조 상지 치료가 급 성기 뇌졸중 환자에 상지 재활을 위해 효과적인 방법임 이 입증하였다. 또한 [Aisen, Krebs, Hogan, McDowell 와 Volpe (1997)]은 급성기 뇌졸중 환자 20명 중 실험 군에 로봇 보조 재활치료를 실시하였고 대조군 보다 상 지 기능과 일상생활 활동 능력, 근위부 상지 근력에서 더 유의한 향상이 있었음을 보고하였다. [Rabadi 등(2008)] 은 뇌졸중 발병 4주 미만의 환자 30명을 대조군, 상지 자전거 운동군과 로봇 치료군에 각각 10명씩 배정하여 1일 1회 40분씩 총 12회 동안 추가적으로 능동 운동을 기반으로 하는 치료를 세 그룹에 적용한 결과 모든 그룹 에서 중재 후 상지 기능, 상지 근력, 일상생활 활동 수행 능력이 향상되었지만 그룹 간의 유의한 차이는 없었다고 하였다. 이러한 연구 결과는 본 연구의 결과와 유사하거 나 일치하는 결과를 보였다. 본 연구의 결과로 로봇 보조 상지 훈련이 급성기 뇌졸중 환자의 상지 기능의 향상과 일상생활활동 능력, 장악력에 효과적인 방법임을 입증되 었다.
본 연구의 결과, 근력 약화로 중력에 대항하여 독립적 인 상지 기능 훈련을 못하는 환자의 팔을 로봇에 장착하 면 팔의 무게가 로봇에 의해 지지됨으로써 중력에 대한 부담이 줄어들어 굴곡 시너지가 감소하므로 선택적 움직 임이 촉진 될 수 있는 것으로 나타났다. 또한 모니터를 통해 제공되는 과제 지향적 기반의 가상현실은 흥미와 동기를 높여 능동적인 참여를 유발할 수 있었다. 본 연구 에서는 운동 자각도를 이용하여 급성기 환자의 신체적 부담감과 피로감을 조절할 수 있도록 하였으며 집중된 훈련(high-dose intensive training)과 특화된 기능적 과제의 반복적 실행(repetitive practice of specific functional tasks)을 통해 상지 기능, 일상생활 활동 수 행력, 장악력이 향상하였다. 그러나 뇌졸중 환자를 대상 으로 로봇 보조 상지 훈련의 효과에 대한 무작위 대조군 연구를 메타분석 한 결과 일상생활 수행능력의 향상만 유의한 것으로 나타나 아직 까지 로봇치료의 효과를 단 정 하기는 어렵기 때문에 전통적인 작업치료를 병행하지 않고 로봇 치료만 단독으로 시행하기에는 근거가 부족한 실정이다([Mehrholz, Hädrich, Platz, Kugler, & Pohl, 2012]). 이렇듯, 로봇 보조 상지 훈련에 관한 연구 결과들 의 차이는 치료 시작 시점, 표준화 및 비 표준화된 반복횟 수와 고강도의 훈련 프로그램 적용 유무, 로봇의 종류 등 에 의해 발생된다고 하였다([Sale et al., 2014b]). 2016 년 로봇 보조 상지 재활 치료에 대한 무작위 대조군 연구 를 분석한 메타분석 결과 뇌졸중 발병 3개월 이후 시행된 연구들에서는 상지 기능과 임상적 측정 변수들의 효과성 이 입증된 반면 뇌졸중 발병 3개월 이내에 시행된 연구들 에서는 측정 변수들의 효과성이 적다는 결론이 나타났는 데 이는 급성기 환자를 대상으로 한 연구들이 무작위 대 조군 연구로 설계되지 않았기 때문이라고 보고하였으며 향후 진행될 연구는 뇌졸중 발병 3개월 이내의 환자들을 대상으로 무작위 대조군 설계를 통한 연구들이 필요하다 고 하였다([Veerbeek, Langbroek-Amersfoort, van Wegen, Meskers, & Kwakkel, 2016]). 이에 본 연구는 국내에서는 급성기 환자를 대상으로 한 상지 로봇 연구 가 극히 드물기 때문에 급성기 뇌줄중 환자를 대상으로 무작위 대조군 예비 연구를 실시한 것에 임상적인 가치 가 있다고 볼 수 있다. 또한, [Burgar, Garber와 Van der Loos (2011)]는 급성기 환자를 대상으로 로봇 연구를 시 작하였으나 운동량의 적절한 강도 조절을 실패하였기 때 문에 본 연구에서는 운동자각지수를 이용하여 1~2주차 에서는 RPE 13(약간 힘들다), 3~4주에서는 RPE 15 (힘들다)로 운동 강도를 표준화 하였다. [Shin, Kim, Lee 와 Shin (2014)]의 뇌졸중 환자의 상지 재활치료에 대한 한국형 표준 진료 지침을 운동치료의 강도의 증가, 운동 학습과 신경 생리적 접근 등을 환자의 상태에 맞게 개별 적으로 적용, 근력 강화, 과제 지향적 훈련, 운동 및 기능 훈련 등을 권고수준 A, 근거수준 1+~1++로 제시하였 다. 본 연구의 결과 실험군과 대조군의 종속변수의 변화 량의 차이에서 유의한 차이가 나타나지 않았지만 실험군 이 더 향상된 것으로 나타났다. 이는 로봇 보조 상지 훈련 이 컴퓨터를 통한 정확한 강도와 난이도를 제공할 수 있 으며, 상지 훈련 시 과제를 통한 동기유발과 흥미를 높여 상지 기능 향상에 도움이 된 것으로 생각된다. 이렇듯, 로봇 보조 상지 훈련은 안정적이고 신뢰할만한 장비로 치료의 강도를 체계적으로 조절하여 집중적인 훈련을 제 공할 수 있고 과제 지향적 훈련의 반복적 실행을 통해 신 경학적 회복을 강화할 수 있는 장점들이 임상에서 상지 로봇 장비를 활용하는 이유라 할 수 있다. 따라서 본 연구 는 국내의 급성기 뇌졸중 환자를 대상으로 로봇 보조 상 지 훈련의 효과를 일반적 작업치료를 받은 대조군과 무 작위 배정하여 비교하였다는 데 의의가 있다. 그러나 대 상자의 수가 14명으로 예비연구로 진행되었으며, 4주 이 후의 평가만 이루어 졌고 그 이후 장기간의 효과까지는 알아보지 못했기 때문에 모든 환자를 대상으로 일반화 하기는 어렵다. 또한 연구 선정기준에 포함되는 대상자 의 상지 기능 수준 범주가 넓어 기능 수준에 대한 차이에 의한 오차를 감안하지 못한 제한점이 있다.
Ⅴ결 론
본 연구는 급성기 뇌졸중 환자를 대상으로 로봇 보조 상지 훈련의 효과를 알아보고자 실시하였다. 두 그룹은 전 통적인 작업치료를 받고 추가적으로 1일 30분씩 4주간 주 5회 실험군은 로봇 보조 상지 재활 훈련을, 대조군은 전통적인 작업치료를 실시하였다. 4주 치료 이후 두 그룹 모두에서 중재 전·후 상지 기능, 일상생활활동 수행력, 장악력에서 유의한 차이가 나타났지만(p<.05), 중재 후 두 그룹 간 변화량의 차이에서는 모두 유의한 차이가 나타 나지 않았다(p>.05). 본 연구를 통해 급성기 뇌졸중 환자 에게 상지 로봇 훈련 후 상지 운동 기능과 일상생활활동 수행력에 효과가 있음을 확인하였다. 이는 안정적이고 신 뢰적인 로봇 보조 장비를 통한 표준화된 중재 프로그램 제공이 급성기 환자의 상지 재활에 중요한 토대가 될 것이 다. 향후 급성기 환자에 대한 더 많은 대상자와 무작위 대 조군 연구들이 지속적으로 이뤄져야 할 것이다.