Journal Information
Article Information
뇌졸중 이후 운전 시뮬레이터와 Dynavision 훈련이 인지 및 운전 수행 능력에 미치는 효과 비교
Author Information
Objective :
The purpose of this study was to compare with the effects of driving simulator and Dynavision training after stroke through the test of cognitive ability and driving performance.
Methods :
Twenty-one stroke patients were randomly classified to the driving simulator training group (N=11) and Dynavision training group (N=10), and were carried out respectively training for 15 times. The driving performances was measured by the driving simulator test, and cognitive-perceptive abilities was measured by the DriveABLE Cognitive Assessment Tool, Trail Making Test-A, Trail Making Test-B and Mini Mental State Examination-K.
Results :
The driving simulator training group showed significant changes in all cognitive tests and most of driving performances. The Dynavision training group also showed significant changes in all cognitive tests except for Trail Making Test-A and some driving performances. The significant differences on both groups were found regarding the estimated degree of results on the on-road evaluation, the number of off road accidents and collisions. In addition, the causal influence of the two training methods on these variables was analyzed to be more than 20%.
Conclusion :
The driving simulator and Dynavision training were found to be effective intervention in the driving rehabilitation after stroke. In particular, it was confirmed that the driving simulator is an effective training to improve overall driving ability of stroke patients. In addition, the difference in training effect between the two training methods was found to be more than 20%.
연구목적 :
본 연구의 목적은 뇌졸중 환자에게 운전 시뮬레이터와 Dynavision 훈련의 효과를 인지 평가와 주행 중 운전수행 능력 평가를 통해 비교하고, 두 가지 훈련방법의 차이에 대한 임상적 근거를 제시하는 것이다.
연구방법 :
본 연구를 위해 뇌졸중 환자 21명을 선정하여 무작위로 운전 시뮬레이터 훈련 집단(N=11)과 Dynavision 훈련 집단(N=10)으로 분류하고 각각 15회기의 훈련을 실시하였다. 대상자들의 주행 중 운 전수행 능력 측정을 위해 운전 시뮬레이터 시나리오 시스템 평가를 실시하였고, 인지 능력을 측정하기 위해 DriveABLE Cognitive Assessment Tool(DCAT), Trail Making Test-A, Trail Making Test-B 그리고 Mini Mental State Examination-K 평가를 실시하였다.
결과 :
운전 시뮬레이터 훈련 집단은 모든 인지 능력평가와 대부분 운전수행 능력에서 통계적으로 유의미한 향상이 확인되었다. Dynavision 훈련 집단은 Trail Making Test-A를 제외한 모든 인지 능력 평가와 브레이크 페달 반응시간, 중앙선 침범 평균 시간 및 비율, 차선이탈 비율의 운전수행 능력에서 통계적으 로 유의미하게 향상 되었다. 그리고 두 가지 훈련의 변화량은 도로주행평가의 결과 예측 지수와, 충돌 사고 및 위험상황 발생 횟수에서 유의미한 차이를 보였으며, 이 변수들의 변화량은 두 가지 훈련방법의 적용 차이에 따라 모든 변수가 20% 이상의 인과적 영향력이 있음이 확인되었다.
결론 :
뇌졸중 환자의 운전훈련 방법으로 운전 시뮬레이터와 Dynavision 훈련은 모두 효과적인 중재방법임 을 확인하였다. 특히 운전 시뮬레이터는 뇌졸중 환자의 운전수행 능력 전반을 향상시킬 수 있는 효과적 인 훈련이며, Dynavision 훈련과는 20%의 설명력으로 훈련효과의 차이가 확인되었다.
Ⅰ.서 론
운전은 힘, 협응, 관절가동범위 등의 운동 조절 능력과 지속적 주의력, 분리 주의력, 시각적 주의력(visual attention), 판단력 등의 인지 능력이 요구되는 복잡한 고위 과제이다([Anstey, Wood, Lord, & Walker, 2005]). 특히 인지 능력은 뇌졸중 환자의 운전 모델에서 운전수행 행동을 이끌어내는 가장 중요한 요소이다([Akinwuntan, Wachtel, & Rosen, 2012]). 이러한 인지 능력의 장애로 뇌졸중 환자들은 운전 중단을 경험하게 된다([Marshall et al., 2007]).
운전은 중요한 이동 수단이므로 뇌졸중 이전에 운전경 험이 있는 환자들은 대부분 다시 운전할 수 있기를 희망 한다([Fisk, Owsley, & Pulley, 1997]). 하지만 이들 중 일부만이 다시 운전이 가능하다([Quigley & DeLisa, 1983]). 따라서 손상이후 운전이 가능한 환자들을 확인 하는 평가 시스템과 운전 재훈련 과정이 필요하다 ([Marshall et al., 2007;] [Nouri & Lincoln, 1993]).
운전수행 평가에서 도로주행 평가는 가장 명확한 평가방 법으로 “Gold-standard”로 간주된다([Meyers, Volbrecht, & Kaster, 1999]). 뇌졸중 환자의 운전 재훈련 효과를 확인하는 연구에서도 도로주행 평가에서의 합격 여부를 확인하는 것은 이상적인 방법이다([Akinwuntan et al., 2005;] [Devos et al., 2010]). 하지만 도로주행 평가는 시 간적, 경제적 비용의 문제와 직접적인 평가의 위험성으 로 널리 사용되는데 어려움이 있다([Akinwuntan et al., 2012]).
반면 운전 시뮬레이터의 시나리오 평가 시스템은 페달 반응속도, 과속, 중앙선 침범, 차선 이탈, 충돌 사고 등 도로주행 중 운전수행 능력(driving performance ability)을 점검할 수 있다([Cimolino & Balkovec, 1998]). 따라서 저비용으로 안전하게 실제 도로에서의 운전 수행력을 예측할 수 있는 운전 시뮬레이터 평가는 도로주행 평가의 대안으로서 다수의 연구에서 뇌졸중과 같은 실제 운전 시 위험성이 높은 질환의 운전수행 평가로 활용되고 있다([Akinwuntan et al., 2005;] [Akinwuntan et al., 2012]).
뇌졸중 환자의 운전수행 평가에서 도로주행 평가와 높 은 연관성을 보여 주로 사용되는 신경학적 인지 평가로 는 TMT-A(Trail Making Test-A), TMT-B(Trail Making Test-B), UFOV(Useful Field Of View test), MMSE-K(Mini Mental State Examination-Korea) 등이 있다([Marshall et al., 2007;] [Park, 2013]). 하지만 이러한 신경학적 평가방법들은 항상 일관성 있게 운전수 행을 예측하지 못하므로 도로주행 평가결과를 일관되게 예측할 수 있는 인지평가방법이 필요하다([Akinwuntan et al., 2012]).
뇌졸중 환자의 운전수행은 주로 주의력, 기억력, 반응 시간, 사고 기능, 시각적 주의력, 운전 중 환경 지각 등의 인지 능력이 요구된다. 그러므로 운전수행을 예측하는 인지 평가는 일반적인 신경학적 평가 방법들과 구별 된 다([Marshall et al., 2007]). 이러한 이유로 운전과 관련 된 인지 능력만을 평가할 수 있는 DriveABLE Cognitive Assessment Tool(DCAT)이 개발되었다. 이 평가는 도 로주행 평가에서의 위험상황 발생 가능성과 탈락 가능성 예측을 통해 위험운전자를 검증할 수 있는 운전관련 인 지평가이다([Dobbs, 2013]).
뇌졸중 환자의 운전재활에서 운전평가 뿐만 아니라 실 제도로에서 실시되는 훈련 프로그램은 위험성이 높고 비 용효율이 떨어지는 제한점이 있다([Devos et al., 2010]). 뇌졸중 환자는 손상이후 운동조절 능력, 인지 능력, 지각 능력에 기능저하를 경험한다(Kwakkel, Wagenaar, Kollen, & Lankhorst, 1996). 따라서 실제 도로에서의 주행 이전에 적용되는 운전 재훈련 프로그램으로 운전 시뮬레이터 훈련, Dynavision 훈련, 전동스쿠터 시뮬레 이션 훈련, UFOV 시각적 부주의 훈련 그리고 게임 또는 퍼즐 등을 이용한 인지 능력 훈련 방법들이 보고되고 있 다([Akinwuntan et al., 2005;] Akinwuntan et al., 2010; [Crotty & George, 2009;] [Devos et al., 2009;] [Devos et al., 2010;] [Jannink, Erren-Wolters, de Kort, & van der Kooij, 2008;] [Mazer et al., 2003]).
뇌졸중 이후 육안으로 관찰 가능하여 예측 가능성이 높은 운동조절 능력 외에 변화를 관찰하기 어려운 인지 능력에 대한 훈련 프로그램은 다수의 연구를 통해 도로 주행과 유사한 운전 시뮬레이터 훈련과 비교분석 되었다 ([Akinwuntan et al., 2005;] Akinwuntan et al., 2010; [Devos et al., 2009;] [Devos et al., 2010]). 반면 육안으 로 관찰되지 않아 능력 변화를 예측하기 어려운 시각적 주의력, 반응속도 및 과제전환(task-switching) 능력을 훈련하는 Dynavision은 단일 운전 재훈련 프로그램의 효과는 보고되고 있으나, 운전 시뮬레이터 훈련과 비교 하여 실제 도로 주행 시 운전 수행 능력의 효과를 확인한 연구는 보고되지 않고 있다([Crotty & George, 2009]). 따라서 뇌졸중 환자에게 Dynavision 훈련 방법이 주행 중 운전수행 능력에 미치는 효과를 공인된 운전 시뮬레 이터 훈련과 비교하면, 두 가지 훈련에 따른 임상적 효과 의 차이를 확인할 수 있다.
이에 본 연구의 목적은 뇌졸중 환자를 대상으로 운전 시뮬레이터 훈련과 Dynavision 훈련을 실시한 후 인지 능력과 주행 중 운전수행 능력의 변화를 확인하고, 이를 통해 두 가지 훈련방법의 효과 차이에 대한 임상적 근거 를 제시하는 것이다.
Ⅱ.연구 방법
1.연구 대상
본 연구를 위해 뇌졸중 진단을 받고 대전광역시 K병 원에서 재활치료중인 환자 23명을 선정하였다. 모든 대상자들은 Microsoft Excel 2010 프로그램의 RANDBETWEEN 함수를 사용하여 무작위로 실험군 1 과 실험군 2로 분류하였다. 심각한 실어증과 개인적 사정 으로 실험군 2에 포함된 2명이 제외 되어 21명이 전체 실험과정에 참여하였다. 본 연구의 대상자 선정 기준은 Devos 등([2010])의 연구를 참고하였으며, 첫째, 시력 장 애 및 간질․발작 과거력이 없고, 둘째, 과거 운전면허를 소지하고 운전 경험이 있고, 셋째, 시뮬레이터 조작을 위 한 운동조절 능력이 충분하고, 넷째, 발병 후 6개월 이상 된 뇌졸중 환자로 설정하였다.
2.연구 대상자의 윤리적 고려
연구자는 연구 대상자의 권리와 안전을 보호하기 위하 여 모든 대상자들이 재활치료를 받고 있는 대전광역시 K 병원의 재활의학과의 승인을 받아 연구를 진행하였다. 본 연구는 공식 연구윤리위원회의 승인은 득하지 못하였 으나, 연구자가 연구 참여 동의서를 포함한 연구절차가 명시된 연구계획을 재활의학과 관리자의 승인을 받아 연 구 윤리를 준수하여 진행하였다. 연구 참여 동의서에는 연구대상자의 익명성, 비밀보장, 자유의사에 따른 연구 참여 및 철회 권리, 연구 참여 중 발생할 수 있는 불이익 을 포함하였다. 연구자는 모든 연구 참여자에게 연구과 정과 연구 참여 동의서에 포함된 내용을 설명하였으며, 서면으로 연구 참여 동의를 득하였다.
3.연구 과정
2013년 7월부터 12월까지 일반적인 재활치료에 추가 적으로 집단별 중재프로그램을 실시하였다. 중재 시간은 Akinwuntan 등([2005]), Akinwuntan 등(2010), Devos 등([2009])과 Devos 등([2010])의 연구를 참고하여 주 2 회 간격으로 1회 1시간씩 총 15시간(15회기)의 중재를 적용하였다(Figure 1).
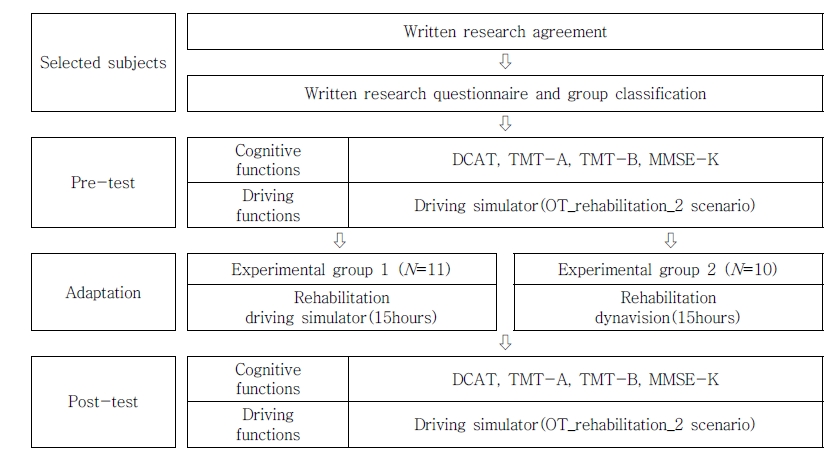 Figure 1Procedure of Study
Figure 1Procedure of Study
4.측정 및 중재 도구
1)DCAT(the DriveABLE Cognitive Assessment Tool)
DCAT은 Dobbs([2013])가 개발에 참여하였으며 인지 손상이 있는 운전자를 실내 평가 시스템(in-office assessment system)을 통해 선별하기 위한 소프트웨 어 기반 운전관련 인지평가 프로그램이다. 터치스크린 방식으로 6가지 과제를 완성하여 운전에 필요한 기억력, 시각적 주의력, 운전환경 지각 능력, 판단력, 의사결정 능력, 위험상황 판단 능력을 측정한다([DriveABLE Assessment Centres Inc, 2010]). 본 연구에서는 중재 전 과 후에 운전과 관련된 인지 능력의 변화를 측정하기 위 해 국내 실정에 맞게 변환된 한국어 버전을 이용하였다. 한국어 버전 DCAT평가의 평가-재평가(test-retest) 신뢰도는 .909~.928이며, TMT-A, TMT-B, MMSE-K 와 0.4이상의 상관성이 확인되었다(Oh, 2014). 본 연구 에서는 평가결과로 도로주행 평가에서 탈락 가능성 (DriveABLE On-Road Evaluation; DORE)과 도로주행 평가 시 위험상황 발생 가능성(Hazardous Situation on DriveABLE On-Road Evaluation; HSDORE)을 제시 하였다.
2)한국판 간이 정신진단 검사(Mini Mental State Examination-Korea; MMSE-K)
Kwon과 Park([1989])에 의해서 한국판으로 번역된 검사로 지남력, 기억등록, 주의집중 및 계산, 기억회상, 언어기능, 이해 및 판단의 6개 하위영역에 12개 문항이 포함되어 있다. 이 검사 도구의 Kappa계수는 0.86으로 신뢰할 만한 검사로 인정받고 있으며, 운전 기능과 연관 성이 있음이 보고되었다([Lee & Shin, 1993;] [Park, 2013]). 본 연구에서는 운전관련 훈련 전과 후 대상자의 인지 능력을 측정하기 위해 사용하였다.
3)TMT(Trail Making Test)
TMT는 A형과 B형으로 구분되며 반응속도, 주의력, 순서화, 실행기능 그리고 시각탐색을 측정하는 인지평가 이다. A형은 25.4×29.5cm의 하얀 종이에 의사무작위 (pseudorandom)형태로 1부터 25까지의 원 숫자가 배 열되어 있고 이를 오름차순으로 연결하는 방식으로 실시 된다. 그리고 B형은 A형과 같은 종위에 1부터 13까지의 원 숫자와 ‘가’부터 ‘타’까지의 원 문자가 의사무작위형태 로 배열되어 있고, 이를 숫자와 문자를 교대로 연결하는 방식으로 실시된다. 결과 측정은 과제를 완성하는 동안 에 소요된 시간을 측정한다([Reitan & Wolfson, 1985;] [Spreen & Strauss, 1998]). 본 연구에서는 운전관련 훈 련 전과 후의 인지 능력 측정을 위해 사용하였다.
4)운전 시뮬레이터(Driving Simulator)
본 연구에 사용된 운전 시뮬레이터는 STISIM Drive System(M100 Series)이다. 이 장치에는 운전자에게 60゚~180゚의 시야를 제공하는 세 개의 모니터, 두 개의 스피커, 운전석, 핸들조작 장치, 페달조작 장치, 실험자용 모니터 그리고 실험자용 컴퓨터로 구성되어 있다. 전체 운전 시뮬레이션 시나리오는 총 53개이며, 본 연구의 평 가와 훈련 세부내용은 다음과 같다.
(1)시나리오 평가 시스템
본 연구에서 대상자의 주행 중 운전수행 능력 분석을 위해 “OT_Rehabilitation_2”시나리오를 사용하였으며, 이는 STISIM Drive에서 제공하는 평가용 시나리오이 다. 주행 중 빨간색 “STOP”신호가 무작위로 화면에 표 시되어 주행 중 페달 반응속도를 측정할 수 있도록 구성 된 것이 두드러진 특징이다. 이 상황은 “STOP”신호가 화면에 표시되면 운전자는 브레이크페달(brake pedal) 을 밟아 멈춰야하고 이때 주행 중 페달 반응속도가 측정 된다. 전체 주행거리는 8km로 도심도로(4차선)와 지방 도(2차선 또는 4차선) 환경에서 언덕길 통과, 교차로 통 과, 신호등 통과, 신호가 없는 횡단보도 통과, 보행자 도 로 진입, 갓길 차량 도로진입, 안개지역 통과, 공사 지역 통과 등 다양한 상황이 포함되어있어 주행 중 운전자의 운전수행 능력을 평가하기 위해 고안된 시나리오이다.
시나리오 평가 시스템은 운전자가 시나리오를 진행하 는 동안 재생되는 동영상과 조작 장치 입력 신호를 분석 하여 주행 중 운전수행 능력을 측정한다. 측정치는 횟수, 0.01초 단위 시간, 전체 주행 대비 이벤트가 발생하는 시 간의 비율이며, 세부내용은 다음과 같다.
① 평균반응속도(mean reaction time): 주행 중 무작 위로 제시되는 “STOP”신호에 반응하는 시간이 측 정된다.
② 과속(speed exceedances): 주행 중 규정 속도가 표지판으로 제시되고 이를 위반한 경우 과속으로 간주한다. 이러한 과속상황의 횟수, 각 과속상황이 지속된 시간의 평균, 전체 주행시간 중 과속상황을 지속한 시간의 비율이 측정된다.
② 중앙선 침범(centerline crossings): 주행 중 좌측 노란색 중앙선을 벗어나 주행한 상황을 중앙선 침 범으로 간주한다. 이러한 중앙선 침범의 횟수, 각 중앙선 침범상황이 지속된 시간의 평균, 전체 주행 시간 중 중앙선을 침범하여 주행한 시간의 비율이 측정된다.
③ 갓길 이탈(road edge excursions): 우측에 하얀색 갓길 차선을 벗어나 주행한 상황을 갓길 이탈로 간 주한다. 이러한 갓길 이탈의 횟수, 각 갓길 이탈상 황이 지속된 시간의 평균, 전체 주행시간 중 갓길을 이탈하여 주행한 시간의 비율이 측정된다.
④ 평균 이탈(mean of deviation): 주행 중 차량이 차 선을 이탈한 중앙선 침범 및 갓길 이탈 이벤트의 평균 횟수, 시간, 이탈하여 주행한 시간의 비율이 측정된다.
④ 사고: 중앙선 침범과 갓길 이탈 시 사고가 발생한 상황인 차선 이탈사고(off road accidents), 차량 등의 지물과 충돌한 상황인 충돌 사고(collisions) 의 횟수가 측정된다.
⑤ 위험 상황(hazard situation): 주행 중 사고와 유사 한 위험상황의 횟수가 측정된다.
⑥ 주행 시간(length of run): 8km의 시나리오를 주 행하는데 소요되는 시간이 측정된다.
(2)페달 반응속도(pedal reaction time) 평가
페달 반응속도 검사는 시나리오 시스템 평가와 별도로 실시하였다. 운전자가 액셀 페달(gas pedal)을 밟고 있 으면 화면에는 초록색 원이 표시되고 이 원이 빨간색 “STOP”신호로 바뀌면 밟고 있던 액셀 페달을 떼고 브레 이크 페달을 밟는다. 액셀 페달에서 발이 떨어지는 시간 과 브레이크 페달을 밟는 시간이 측정되고, 이는 액셀 반 응시간과 브레이크 반응시간 그리고 두 시간을 합친 전 체 페달반응 시간으로 기록된다.
(3)운전 시뮬레이터 훈련
운전기능 평가에 사용된 “OT_Rehabilitation_2”시나 리오를 제외한 52개의 시나리오를 이용하여 운전 시뮬 레이터 훈련을 실시하였다. 각각의 시나리오는 도심, 고 속도로, 지방도, 산악도로, 사막 등의 배경에서 운전환경 을 재현하고 있다. 또한 이러한 운전환경에서 터널, 주차 장, 안개 지역, 공사 지역, 정체도로, 침수도로, 강풍주의 구간 통과와 주유소 진입, 신호대기, 교차로 진입, 등의 상황이 제공되어 다양한 운전 상황에서 훈련이 가능하다. 대상자가 시나리오에서 제시되는 상황을 학습하지 않고 훈련할 수 있도록 매 훈련 회기 마다 무작위로 시나리오 를 제시하였다.
5)Dynavision 훈련
Dynavision은 Warren(1993)에 의해 설명된 시각적 추적, 시각적 주의력, 시각적 운동 조절과 같은 기본적인 시 지각 기술을 훈련한다. 165㎝ x 120㎝의 사각 판이 벽에 고정되어 있고 그 위에 1㎝ × 1㎝크기의 붉은 빛이 들어오는 버튼 64개가 5줄의 원 구조로 배열되어있다. 사각 판의 중앙에는 최대 7자리의 숫자가 표시될 수 있는 LCD가 위치한다. 훈련은 총 15시간동안 실시하였고 포 함된 프로그램은 Self paced, Apparatus paced, Digital flash, Visual tracking, Simple response time, Choice response time이다.
5.분석 방법
결과 분석을 위한 통계적 유의수준α는 .05로 하였다. 집단 간 동질성과 중재효과 분석을 위해 카이제곱검정과 독립표본 t 검정(independent t-test)을 사용하였다. 집단 내 변화는 대응표본 t 검정(paired t-test), 집단의 변화량 차이는 독립표본 t 검정을 사용하였다. 두 가지 훈련 방법과 인지 능력 평가결과 및 주행 중 운전자 행동 변수와의 상관성을 확인하기 위해 피어슨 상관분석 (Pearson’s correlation coefficient)을 실시하였으며, 인과적 영향을 확인하기 위해 집단 변수를 더미변수로 변환하여 단순 선형 회귀분석(linear regressive analysis)을 실시하였다.
Ⅲ.연구 결과
1.연구 대상자 특성
두 실험군 사이의 일반적 특성 및 운전관련 특성 구성 비율, 인지능력은 통계적으로 유의미한 차이가 없어 집 단 간 동질성이 확인되었다(Table 1).
2.운전 시뮬레이터 훈련 집단의 변화
운전 시뮬레이터 훈련 집단은 훈련 전과 후에 모든 운 전관련 인지 평가에서 통계적으로 유의미한 향상을 보였 다. 주행 중 운전수행 능력은 엑셀 페달 반응시간, 과속 횟수 및 비율, 평균 중앙선 침범 시간, 차선이탈사고 횟 수, 위험상황 횟수, 전체 주행 시간을 제외하고 유의한 향상이 확인되었다(Table 2).
3.Dynavision 훈련 집단의 변화
Dynavision 훈련 집단은 훈련 전과 후에 모든 인지 평가 중 TMT-A를 제외한 모든 평가에서 통계적으로 유의미 한 향상을 보였다. 주행 중 운전수행 능력은 브레이크 페달 반응시간, 중앙선 침범 평균 시간 및 비율, 차선이탈 비율 에서 통계적으로 유의한 향상이 확인되었다 (Table 3).
4.운전 시뮬레이터 훈련과 Dynavision 훈련 사이의 효과비교
인지 기능 중 DCAT에서 제시하는 도로주행평가에서 탈락가능성과 도로주행평가에서 위험상황 발생 가능성 의 변화량은 운전 시뮬레이터 훈련 집단이 Dynavision 훈련 집단보다 통계적으로 많은 변화가 있음이 확인되었 다. 주행 중 운전수행 능력은 충돌사고와 위험상황 발생 횟수의 변화량에서 Dynavision 훈련 집단보다 운전 시 뮬레이터 훈련 집단이 통계적으로 유의하게 더 많은 것 으로 확인되었다(Table 4).
5.운전 시뮬레이터 및 Dynavision 훈련의 효과 분석
운전시뮬레이터와 Dynavision 훈련 방법에 따른 중재 효과의 인과성을 확인하기 위해 두 가지 중재 방법의 효 과에서 유의한 차이가 확인된 변수를 대상으로 단순 회 귀분석을 실시하였다. 관측치들 간의 상관관계를 의미하 는 Durbin-Watson 검사 결과 d값이 주행 중 충돌사고 횟수는 2.405, 위험상황 발생 횟수는 2.322, DORE는 1.447, HSDORE는 1.318로 모두 2에 가까우므로 독립 적인 모델이라 할 수 있다. 모델의 적합성을 나타내는 F 값은 주행 중 충돌사고 횟수(6.188, p<.05), 위험상황 발생 횟수(5.319, p<.05), DORE(10.997, p<.01), HSDORE(7.668, p<.05) 모두 통계적으로 유의하였다. 모델의 설명력을 나타내는 결정계수 값(R 2)은 주행 중 충돌사고 횟수가 24.6%, 위험상황 발생 횟수가 21.9%, DORE가 36.7%, HSDORE가 28.8%로 확인되었다 (Table 5).
6.도로주행 평가에서의 위험성과 운전기능 사이의 상관관계
시나리오시스템 평가결과 중 운전시뮬레이터와 Dynavision 훈련 집단 모두에서 유의한 변화가 확인되 지 않은 변수를 제외한 모든 변수를 이용해 상관관계분 석을 실시하였다. 상관관계분석 결과 DORE와 HSDORE 는 평균 반응속도, 중앙선 침범(횟수, 비율), 갓길 이탈 횟수, 갓길 이탈 비율, 평균 이탈(횟수, 시간, 비율), 충돌 사고 횟수(p<.01) 그리고 중앙선 침범 평균 시간, 갓길 이탈 평균 시간(p<.05)과 통계적으로 유의미한 상관성 을 보였다. 상관계수는 .34에서 .66으로 뚜렷한 상관성 을 보였고, 특히 평균 이탈 비율과 충돌 사고 횟수는 .60 이상으로 운전수행 능력 변수들 가운데 가장 높은 상관 성을 보였다(Table 6).
Ⅳ.고 찰
본 연구는 뇌졸중 환자를 대상으로 운전 시뮬레이터 훈련과 Dynavision 훈련방법의 효과를 비교분석 하였 다. 두 가지 훈련에 따른 변화량분석을 통해 DCAT의 도 로주행 평가에서의 탈락가능성 및 위험상황 발생 가능성 과 주행 중 충돌사고 및 위험상황 발생 횟수에서 훈련 효 과의 차이가 있음이 확인되었다. 또한 운전 시뮬레이터 훈련은 대부분의 인지 능력 평가결과와 주행 중 운전수 행 능력에 효과가 있음이 확인되었고, Dynavision 훈련 은 TMT-A를 제외한 인지 능력 평가와 몇몇 주행 중 운전수행 능력에 효과가 있음이 확인되었다.
TMT-A는 반응속도, 시각적 탐색, 시각적 주의력 등 을 측정하는 평가이며, TMT-B는 시각적 주의력, 시각 적 탐색 그리고 반응속도와 함께 실행기능과 과제전환 능력이 함께 요구되는 평가이다(Reitan, 1955). 따라서 Dynavision 훈련 방법이 시각적 주의력이나 반응속도 외에도 실행기능과 과제전환 능력에도 효과가 있다고 해 석할 수 있다. Dynavision의 훈련 방법 중 선택 반응속도 (choice response time) 훈련은 대상자가 하나의 버튼 을 누르고 있는 동안 4개의 버튼 중 무작위로 불이 들어 오고 이에 반응하는 방식으로 진행된다. 또한 숫자 점등 (digital flash) 옵션은 불이 들어오는 버튼을 누르는 과 제와 동시에 중앙에 위치한 숫자판에 일정 시간마다 제 시되는 1~7자리 숫자를 인식하도록 한다. 이러한 훈련 방법은 단순한 주의력 및 반응속도뿐만 아니라 동시에 과제에 집중하는 분리 주의력과 두 가지 과제를 전환하는 능력을 훈련할 수 있다(Klavora, Gaskovski, Heslegrave, Quinn, & Young, 1995). 본 연구에서 확인된 Dynavision 훈련의 효과는 기존의 연구에서 입증된 시각적 주의력 향상과는 상이한 결과이다([Crotty & George, 2009]). 시각적 주의력, 시각적 탐색, 반응속도와 함께 분리 주의 력, 시-지각 능력, 판단력, 실행기능 등의 인지 능력이 복합적으로 요구되는 운전의 특성을 고려할 때 본 연구 를 통해 Dynavision 훈련의 중재 효과에 대한 근거가 제 시되었다([Anstey et al., 2005]).
운전 시뮬레이터 훈련은 실제 운전환경과 유사한 환경에 서 더욱 많은 경험을 하게 되며, Dynavision 훈련은 실제 운전환경에서의 주행 경험이 상대적으로 작기 때문에 운 전 시뮬레이터의 시나리오 경험에 따른 학습효과가 본 연구의 결과에 영향을 미칠 수 있는 변수라 할 수 있다 (Galski, Ehle, McDonald, & Mackevich, 2000). 연구 자는 이를 통제하기 위해 운전 시뮬레이터의 53개 시나 리오 중 1개의 평가용 시나리오를 평가에만 활용하여 운 전 시뮬레이터 실험군의 경험을 최소화 하였다. 또한 각 각 다른 환경을 제공하는 52개 시나리오는 훈련 시 무작 위로 제시하여 경험에 따른 학습을 최소화 하였다. 운전 시뮬레이터 집단은 시나리오 주행 중 핸들을 조작하여 차선을 유지하는 운전수행 능력 대부분에 변화가 확인되 었고, Dynavision 훈련은 브레이크 페달 반응 속도를 포 함한 일부 운전수행 능력에서만 유의한 향상이 확인되었 다. 뿐만 아니라 두 집단의 변화량 비교에서 운전수행 능 력 중 충돌사고 및 위험상황 발생 횟수 외에는 유의한 차 이가 확인되지 않았다. 따라서 본 연구의 운전 시뮬레이 터 훈련 및 평가 방식의 제어가 모든 학습효과를 통제 할 수는 없었지만 운전 시뮬레이터를 조작하는 기술의 학습 외에 시나리오에서 주어지는 상황에 따른 학습효과는 최 소화 하였다고 볼 수 있다.
또한 본 연구에서 확인된 두 훈련 집단 사이의 운전수 행 능력 차이 중 충돌사고 및 위험상황 발생 횟수는 운전 중 발생할 수 있는 가장 위험한 상황을 대표하는 지표로 기존의 운전 시뮬레이터 훈련 효과를 확인하는 연구의 변수로도 적극 활용되고 있다(Crundall, Andrews, Van Loon, & Chapman, 2010). 본 연구에서 Dynavision 훈 련 집단의 운전 시뮬레이터 조작 경험 부족에 따른 차선 을 유지하는 조작 능력과 비교하여 사고발생과 같은 극 단적 상황은 상대적으로 영향력이 적을 수 있다. 이러한 전제를 감안한다면 본 연구에서의 운전 시뮬레이터 훈련 집단이 Dynavision 훈련 집단과 비교하여 유의한 차이 를 보인 사고관련 변수는 의미 있는 결과로 해석된다. 다 른 측면에서 운전 시뮬레이터는 다른 운전 훈련 방법들 과 차별화된 장점으로 실제와 유사한 운전 환경을 경험 할 수 있다는데 있다(Casutt, Theill, Martin, Keller, & Jӓncke, 2014). 따라서 본 연구를 통해 운전 시뮬레이터 훈련은 가상의 환경에서 운전을 경험하는 차별화된 방법 임을 확인하였으며, 이는 실제도로에서의 평가 또는 훈 련 이전에 사고위험성을 최소화 한 상태로 적용하기 적 절한 훈련이라 판단된다.
본 연구에서 운전 시뮬레이터 훈련은 뇌졸중 환자의 인지 능력과 주행 중 운전수행 능력 전반에 유의미한 향상 을 나타내어 효과적인 훈련 방법임을 확인할 수 있었다. 이러한 결과는 기존 연구에서 운전 시뮬레이터 중재 이후 운전능력이 향상되었음을 보고하는 결과들과 일치한다 ([Akinwuntan et al., 2005], Akinwuntan et al., 2010; [Devos et el., 2010]). 기존의 Akinwuntan 등([2005])과 Devos 등([2010])의 연구에서 운전 시뮬레이터 훈련이후 도로주행 평가에서 합격에 포함된 인구수가 유의미하게 증가되었다고 하였다. 그리고 Crotty와 George([2009]) 와 Akinwuntan 등(2010)은 운전 시뮬레이터 훈련이후 시각적 탐색능력과 반응속도에서 유의한 변화를 확인할 수 있었다고 하였다. 종합해보면 운전 시뮬레이터 훈련은 운전관련 인지 및 운전수행 능력 향상을 통해 도로주행 평가에서의 합격 가능성과 안전한 운전능력을 강화할 수 있는 수단이다.
본 연구에서는 운전수행 능력의 변화뿐만 아니라 운전 관련 인지 평가인 DCAT을 통해 도로주행 평가에서의 실패 가능성과 위험상황 발생 가능성의 변화를 확인하였 다. 이는 운전 시뮬레이터 훈련과 Dynavision 훈련 집단 모두 향상되었으며 향상된 변화량은 운전 시뮬레이터 집 단이 유의하게 높은 것으로 분석되었다. DCAT에서 제 시하는 도로주행 평가에서의 실패 가능성과 위험상황 발 생 가능성 예측 지수인 DORE와 HSDORE는 운전기능 중 평균 이탈 비율 그리고 충돌 사고 횟수와 60% 이상의 뚜렷한 상관성을 보였다. 평균 이탈은 핸들 조작을 통해 주행 시 흔들림 없이 차선을 따라가는 능력을 보여주는 운전기능이며 충돌 사고는 운전수행 시 발생할 수 있는 가장 위험한 오류이다([Blane, Lee, Falkmer, & Willstrand, 2017;] [Lundqvist, Gerdle, & Rönnberg, 2000]). 이와 같이 운전수행에서 많은 비중을 차지하는 운전수행 능력들과 DORE 및 HSDORE 사이의 상관성 은 DCAT에 따른 운전위험성이 실제 도로에서의 위험성 과 연관성이 있음을 반증하는 결과이다.
기존의 연구를 통해 운전 시뮬레이터 평가에서 충돌사 고가 발생한 뇌졸중 환자의 85%가 도로주행 평가를 통 과하지 못하였음이 보고되었다([Lundqvist et al., 2000]). 본 연구에서 Dynavision 훈련 집단은 시뮬레이 터 평가에서 충돌사고 발생 건수의 유의한 향상이 확인 되지 않은 반면 운전 시뮬레이터 훈련 집단은 충돌사고 에서 유의한 향상이 확인되었다. 또한 해당 변수의 훈련 전과 후의 변화량도 두 집단 사이에서 통계적으로 유의 한 차이가 확인되었다. 기존 연구의 결과와 함께 해석해 볼 때 운전 시뮬레이터 평가에서 충돌사고 횟수는 실제 운전 시 위험성을 예측하는 주요 변수임을 추론해볼 수 있다.
따라서 본 연구에서 두 집단 사이에 유의한 차이가 확 인된 충돌사고 횟수, 위험상황 발생 횟수, DCAT의 DORE와 HSDORE를 실제 운전 시 위험성을 대표할 수 있는 변수로 간주하고 운전 시뮬레이터와 Dynavision 훈련 집단 변수와의 인과성을 분석하였다. 그 결과 4가지 변수는 모두 훈련방법에 따른 차이가 20% 이상의 영향 을 미치고 있음이 확인되었다. 이는 두 가지 훈련 방법이 모두 훈련 효과가 있음을 감안할 때 훈련방법을 다르게 할 경우 20% 이상의 훈련효과에 차이가 있음을 의미하 는 결과이다. 운전 시뮬레이터와 Dynavision 훈련 방법 은 직접적인 운전방식을 훈련하는 시뮬레이터가 더욱 효 과적이라는 가설이 당연한 결과로 해석될 수 있다. 다만, 본 연구를 통해 확인된 훈련 방법의 차이는 객관적 지표 라 할 수 있는 통계치로 근거를 제시하였다는데 의의가 있다.
최근 국외의 뇌졸중 환자를 대상으로 운전 시뮬레이 터 훈련과 인지 훈련, 시각적 주의력 훈련 등 다양한 훈 련방법들과 효과를 비교한 다수의 연구들이 보고되고 있다([Blane et al., 2017;] [Devos et al., 2009;] [Devos et al., 2010]). 국내의 경우 뇌졸중 또는 노인 운전자를 대상으로 한 운전관련 연구가 활발히 진행되고 있으나 평가의 개발, 신뢰도 및 타당도 검증 연구들이 주를 이 루고 있으며, 운전시뮬레이터 훈련을 실시한 경우 대상 자 선정에 어려움이 있다([Han et al., 2018;] [Oh, Song, & Lee, 2015;] [Park, Kim, Shin, & Son, 2015]). 본 연 구에서도 연구 참여 인원이 충분하지 않았으며, 향후 보 다 많은 뇌졸중 환자를 대상으로 광범위한 연구가 이루 어져야 할 것이다. 또한 운전 시뮬레이터 훈련을 실시한 실험군에게 시나리오 노출을 최소화하는 방식으로 학습 효과를 통제하도록 연구를 설계하였으나, 시뮬레이터의 기계적 조작에 대한 기술적 학습은 완벽히 통제하지 못 하였다. 이어지는 운전재활 연구에서는 보다 체계적인 변수 통제를 통해 훈련 효과를 입증할 필요가 있을 것으 로 판단된다.
Ⅴ.결 론
본 연구에서 뇌졸중 환자를 대상으로 운전 시뮬레이터 훈련과 Dynavision 훈련을 실시하고 인지 능력과 주행 중 운전수행 능력의 변화를 확인하였다. 또한 두 가지 훈 련방법에 따른 운전수행에 미치는 영향을 비교하였다. 그 결과 뇌졸중 환자의 운전 재훈련 방법으로 두 가지 훈 련방법은 모두 효과적인 중재방법임을 확인하였다. 특히 운전 시뮬레이터는 뇌졸중 환자의 운전수행 능력 전반을 향상시킬 수 있는 효과적인 훈련임을 입증하였다. 반면 Dynavision 훈련은 20%의 설명력으로 운전 시뮬레이터 와 비교하여 제한적인 효과가 있지만 주의력, 반응속도, 과제전환 능력 향상에 효과적이었다. 따라서 뇌졸중 이 후 두 가지 운전훈련 프로그램은 목적에 따라 적절하게 활용될 수 있을 것이다.